Learning Temporally Consistent Rigidities
Abstract
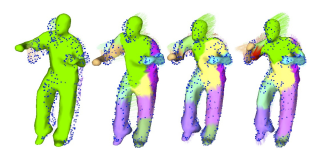
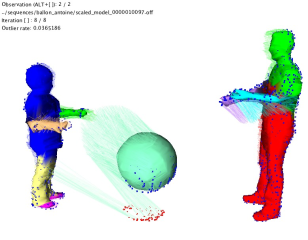
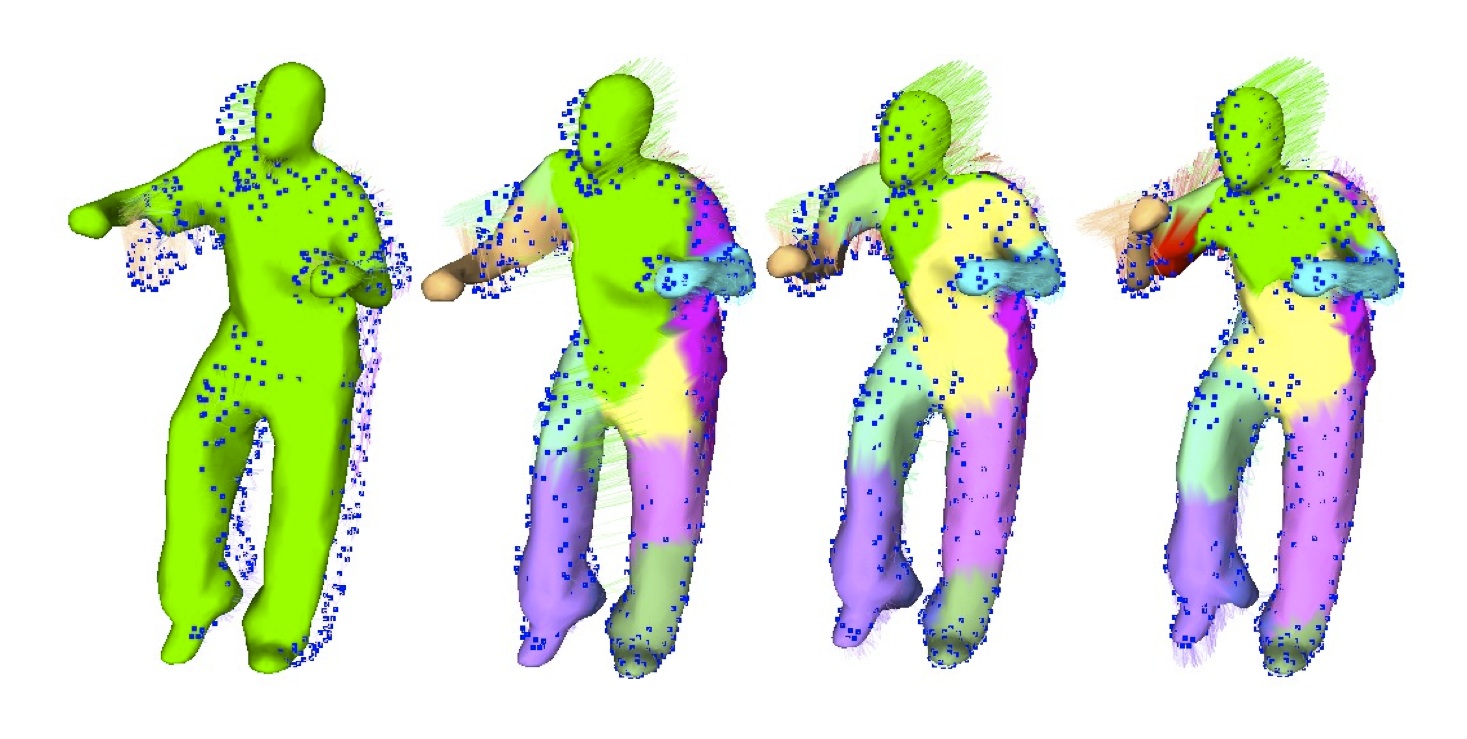
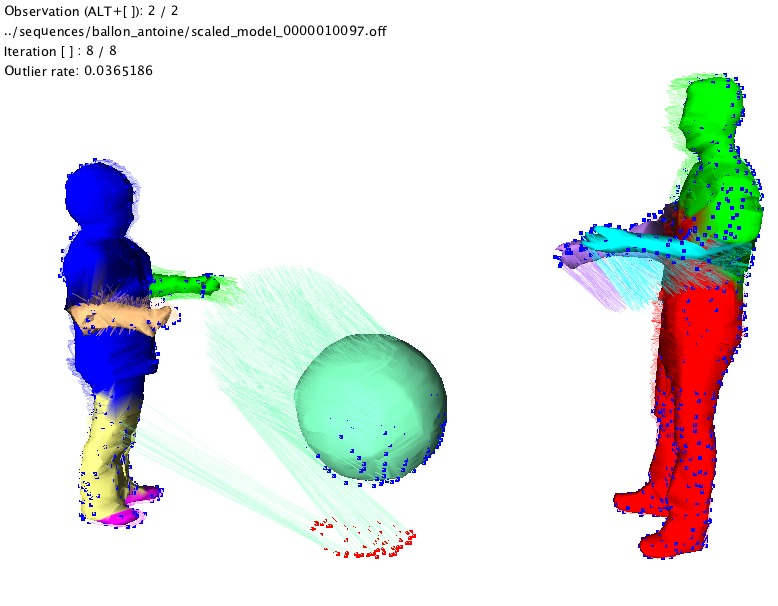
We present a novel probabilistic framework for rigid tracking and segmentation of shapes observed from multiple cameras. Most existing methods have focused on solving each of these problems individually, segmenting the shape assuming surface registration is solved, or conversely performing surface registration assuming shape segmentation or kinematic structure is known. We assume no prior kinematic or registration knowledge except for an over-estimate k of the number of rigidities in the scene, instead proposing to simultaneously discover, adapt, and track its rigid structure on the fly. We simultaneously segment and infer poses of rigid subcomponents of a single chosen reference mesh acquired in the sequence. We show that this problem can be rigorously cast as a likelihood maximization over rigid component parameters. We solve this problem using an Expectation Maximization algorithm, with latent observation assignements to reference vertices and rigid parts. Our experiments on synthetic and real data show the validity of the method, robustness to noise, and its promising applicability to complex sequences.
Fichier principal
 paper541.pdf (2.61 Mo)
Télécharger le fichier
paper541.pdf (2.61 Mo)
Télécharger le fichier
 lock30-iteration.jpg (247.84 Ko)
Télécharger le fichier
CVPR2011-Learning-Temporally-Consistent-Rigidities.mp4 (8.42 Mo)
Télécharger le fichier
lock30-iteration.jpg (247.84 Ko)
Télécharger le fichier
CVPR2011-Learning-Temporally-Consistent-Rigidities.mp4 (8.42 Mo)
Télécharger le fichier
 ballon-outlier.jpeg (96.32 Ko)
Télécharger le fichier
ballon-outlier.jpeg (96.32 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origin : Files produced by the author(s)
Format : Figure, Image
Format : Video
Format : Figure, Image