High-Resolution Depth Maps Based on TOF-Stereo Fusion
Résumé
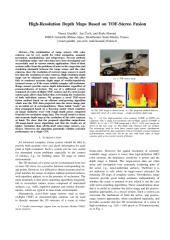
The combination of range sensors with color cameras can be very useful for robot navigation, semantic perception, manipulation, and telepresence. Several methods of combining range- and color-data have been investigated and successfully used in various robotic applications. Most of these systems suffer from the problems of noise in the range-data and resolution mismatch between the range sensor and the color cameras, since the resolution of current range sensors is much less than the resolution of color cameras. High-resolution depth maps can be obtained using stereo matching, but this often fails to construct accurate depth maps of weakly/repetitively textured scenes, or if the scene exhibits complex self-occlusions. Range sensors provide coarse depth information regardless of presence/absence of texture. The use of a calibrated system, composed of a time-of-flight (TOF) camera and of a stereoscopic camera pair, allows data fusion thus overcoming the weaknesses of both individual sensors. We propose a novel TOF-stereo fusion method based on an efficient seed-growing algorithm which uses the TOF data projected onto the stereo image pair as an initial set of correspondences. These initial ''seeds'' are then propagated based on a Bayesian model which combines an image similarity score with rough depth priors computed from the low-resolution range data. The overall result is a dense and accurate depth map at the resolution of the color cameras at hand. We show that the proposed algorithm outperforms 2D image-based stereo algorithms and that the results are of higher resolution than off-the-shelf color-range sensors, e.g., Kinect. Moreover, the algorithm potentially exhibits real-time performance on a single CPU.
Fichier principal
 GhandiCechHoraud_ICRA12.pdf (617.31 Ko)
Télécharger le fichier
GhandiCechHoraud_ICRA12.pdf (617.31 Ko)
Télécharger le fichier
 tof-stereo.jpg (3.17 Ko)
Télécharger le fichier
tof-stereo.jpg (3.17 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...