Robust diameter-based thickness estimation of 3D objects
Résumé
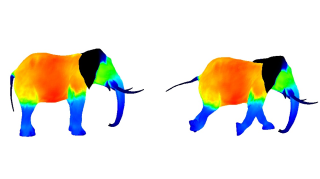
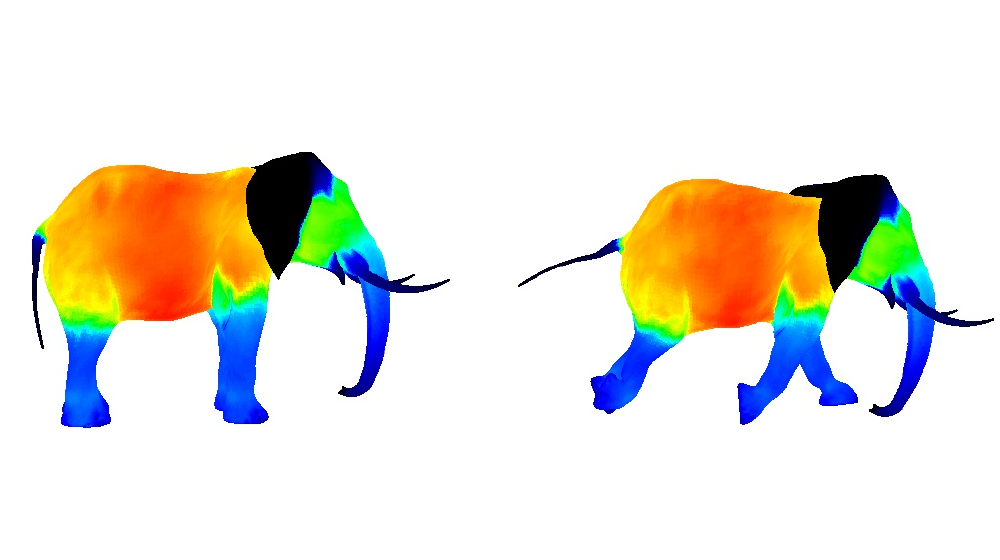
We propose a robust thickness estimation approach for 3D objects based on the Shape Diameter Function (SDF). Our method first applies a modified strategy to estimate the local diameter with increased accuracy. We then compute a scale-dependent robust thickness estimate from a point cloud, constructed using this local diameter estimation and a variant of a robust distance function. The robustness of our method is benchmarked against several operations such as remeshing, geometric noise and artifacts common in triangle soups. The experimental results show a more stable local thickness estimation than the original SDF, and consistent segmentation results on defect-laden inputs.
Domaines
Géométrie algorithmique [cs.CG]
Fichier principal
 thickness.pdf (8.57 Mo)
Télécharger le fichier
thickness.pdf (8.57 Mo)
Télécharger le fichier
 thickness.png (247.37 Ko)
Télécharger le fichier
thickness.png (247.37 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...