Human Shape and Pose Tracking Using Keyframes
Résumé
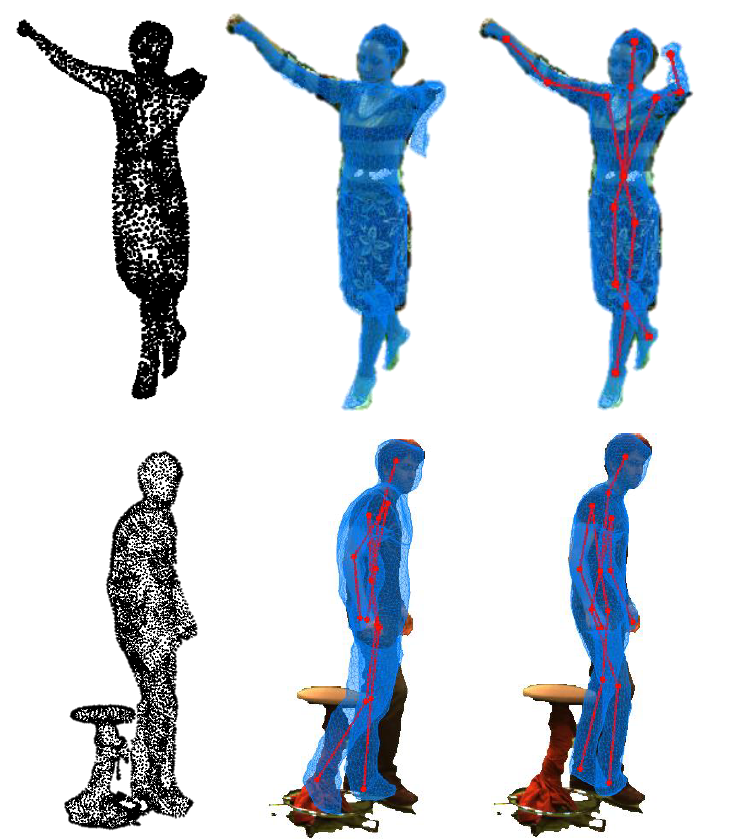
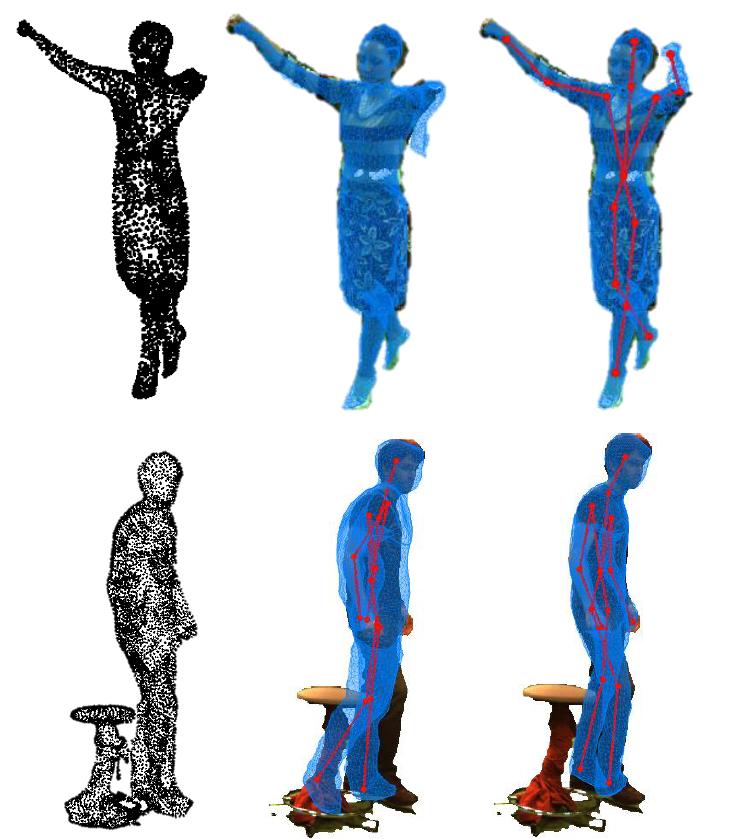
This paper considers human tracking in multi-view set-ups and investigates a robust strategy that learns online key poses to drive a shape tracking method. The interest arises in realistic dynamic scenes where occlusions or segmentation errors occur. The corrupted observations present missing data and outliers that deteriorate tracking results. We propose to use key poses of the tracked person as multiple reference models. In contrast to many existing approaches that rely on a single reference model, multiple templates represent a larger variability of human poses. They provide therefore better initial hypotheses when tracking with noisy data. Our approach identifies these reference models online as distinctive keyframes during tracking. The most suitable one is then chosen as the reference at each frame. In addition, taking advantage of the proximity between successive frames, an efficient outlier handling technique is proposed to prevent from associating the model to irrelevant outliers. The two strategies are successfully experimented with a surface deformation framework that recovers both the pose and the shape. Evaluations on existing datasets also demonstrate their benefits with respect to the state of the art.
Fichier principal
 huangc2014cvpr.pdf (1.96 Mo)
Télécharger le fichier
huangc2014cvpr.pdf (1.96 Mo)
Télécharger le fichier
 PaulCVPR14.png (424.18 Ko)
Télécharger le fichier
PaulCVPR14.png (424.18 Ko)
Télécharger le fichier
 PaulCVPR14.jpg (74.37 Ko)
Télécharger le fichier
PaulCVPR14.tiff (497.79 Ko)
Télécharger le fichier
PaulCVPR14.jpg (74.37 Ko)
Télécharger le fichier
PaulCVPR14.tiff (497.79 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Loading...