Line Drawing Interpretation in a Multi-View Context
Résumé
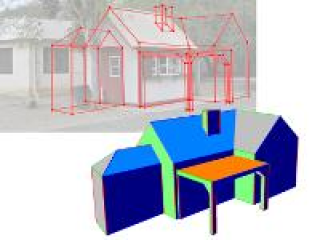
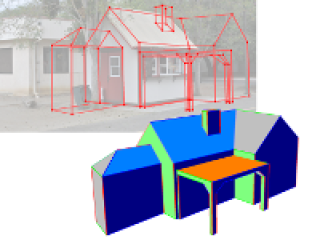
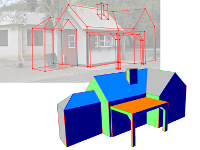
Many design tasks involve the creation of new objects in the context of an existing scene. Existing work in computer vision only provides partial support for such tasks. On the one hand, multi-view stereo algorithms allow the reconstruction of real-world scenes, while on the other hand algorithms for line-drawing interpretation do not take context into account. Our work combines the strength of these two domains to interpret line drawings of imaginary objects drawn over photographs of an existing scene. The main challenge we face is to identify the existing 3D structure that correlates with the line drawing while also allowing the creation of new structure that is not present in the real world. We propose a labeling algorithm to tackle this problem , where some of the labels capture dominant orientations of the real scene while a free label allows the discovery of new orientations in the imaginary scene. We illustrate our algorithm by interpreting line drawings for urban planing, home remodeling, furniture design and cultural heritage.
Domaines
Mathématique discrète [cs.DM]
Fichier principal
 1288.pdf (6.2 Mo)
Télécharger le fichier
1288_sm.pdf (135.85 Ko)
Télécharger le fichier
1288.pdf (6.2 Mo)
Télécharger le fichier
1288_sm.pdf (135.85 Ko)
Télécharger le fichier
 cvpr15b.jpg (6.47 Ko)
Télécharger le fichier
cvpr15b.jpg (6.47 Ko)
Télécharger le fichier
 cvpr15b.png (32.82 Ko)
Télécharger le fichier
cvpr15b.png (32.82 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)