Fast Cloth Simulation with Implicit Contact and Exact Coulomb Friction
Résumé
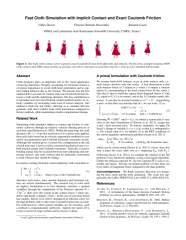
Cloth dynamics plays an important role in the visual appearance of
moving characters. Properly accounting for frictional contact is of
utmost importance to avoid cloth-body penetration and to capture
folding behavior due to dry friction. We present here the first
method able to account for contact with exact Coulomb friction
between a cloth and the underlying character. Our key contribution
is to formulate and solve the frictional contact problem merely on velocity
variables, by leveraging some tools of convex analysis. Our method
is both fast and robust, allowing us to simulate full-size garments
with more realistic body-cloth interactions compared to former methods,
while maintaining similar computational timings.
Fichier principal
 resume-poster-SCA-2015.pdf (1.19 Mo)
Télécharger le fichier
poster.pdf (4.11 Mo)
Télécharger le fichier
resume-poster-SCA-2015.pdf (1.19 Mo)
Télécharger le fichier
poster.pdf (4.11 Mo)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Loading...