A Distributed Architecture for Interacting with NAO
Résumé
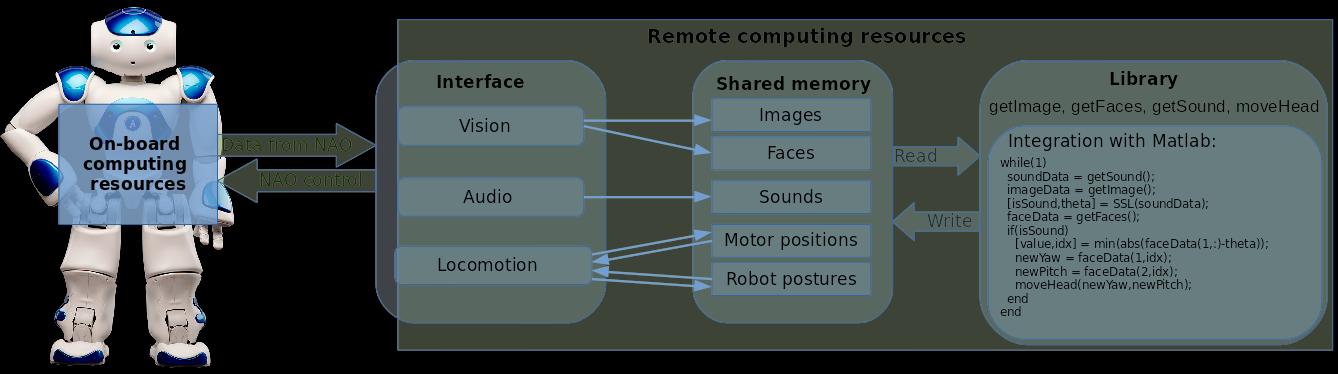
One of the main applications of the humanoid robot NAO – a small robot companion – is human-robot interaction (HRI). NAO is particularly well suited for HRI applications because of its design, hardware specifications, programming capabilities, and affordable cost. Indeed, NAO can stand up, walk, wander, dance, play soccer, sit down, recognize and grasp simple objects, detect and identify people, localize sounds, understand some spoken words, engage itself in simple and goal-directed dialogs, and synthesize speech. This is made possible due to the robot's 24 degree-of-freedom articulated structure (body, legs, feet, arms, hands, head, etc.), motors, cameras, microphones, etc., as well as to its on-board computing hardware and embedded software, e.g., robot motion control. Nevertheless, the current NAO configuration has two drawbacks that restrict the complexity of interactive behaviors that could potentially be implemented. Firstly, the on-board computing resources are inherently limited, which implies that it is difficult to implement sophisticated computer vision and audio signal analysis algorithms required by advanced interactive tasks. Secondly, programming new robot functionalities currently implies the development of embedded software, which is a difficult task in its own right necessitating specialized knowledge. The vast majority of HRI practitioners may not have this kind of expertise and hence they cannot easily and quickly implement their ideas, carry out thorough experimental validations, and design proof-of-concept demonstrators. We have developed a distributed software architecture that attempts to overcome these two limitations. Broadly speaking, NAO's on-board computing resources are augmented with external computing resources. The latter is a computer platform with its CPUs, GPUs, memory, operating system, libraries, software packages, internet access, etc. This configuration enables easy and fast development in Matlab, C, C++, or Python.
Fichier principal
 icmiv2-forHAL.pdf (1.47 Mo)
Télécharger le fichier
icmiv2-forHAL.pdf (1.47 Mo)
Télécharger le fichier
 avloc.jpg (57.3 Ko)
Télécharger le fichier
poster_IROS2015.pdf (508.08 Ko)
Télécharger le fichier
avloc.jpg (57.3 Ko)
Télécharger le fichier
poster_IROS2015.pdf (508.08 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Commentaire : fichier auteur
Commentaire : fichier auteur
Format : Figure, Image
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)