Poppy Ergo Jr : un kit robotique au coeur du dispositif Poppy Éducation
Résumé
Pour favoriser une meilleure appréhension du monde numérique, le dispositif Poppy Éducation propose un kit robotique pédagogique open source baptisé « kit Ergo Jr ». Il se destine principalement aux élèves et enseignants de la fin du collège et du lycée, mais modularité a fait naître des projets à de nombreux niveaux, abordant de nombreuses disciplines. Nous présentons ici la démarche de conception centrée utilisateur qui a conduit son développement ainsi que les objectifs de dissémination qui y ont été associés. Nous présentons le kit en lui même, composé d'un robot à construire soi-même et d'un livret d'accompagnement pédagogique contenant des activités clé en main. Nous développons certains des usages qui en ont été fait dans le milieu scolaire, et plus particulièrement dans les sections ISN et ICN. Enfin, nous exposons les méthodes et résultats des questionnaires d'utilisabilité que nous avons fait remplir à des élèves de la région Nouvelle Aquitaine ayant pratiqué des activités avec le robot Ergo Jr. Ces questionnaires ont également été complétés par leurs enseignants.
Fichier principal
 PDF_Dispositif_Poppy_Education_didapro2017.pdf (1.22 Mo)
Télécharger le fichier
PDF_Dispositif_Poppy_Education_didapro2017.pdf (1.22 Mo)
Télécharger le fichier
 attrakdiff_point3.png (176.6 Ko)
Télécharger le fichier
attrakdiff_point3.png (176.6 Ko)
Télécharger le fichier
 ergo.jpg (85.82 Ko)
Télécharger le fichier
ergo.jpg (85.82 Ko)
Télécharger le fichier
 sus_val_moy.png (277.78 Ko)
Télécharger le fichier
sus_val_moy.png (277.78 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
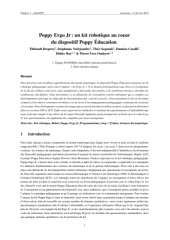
Commentaire : La répartition globale est plutôt bien localisée: la moyenne générale se situe à x=1,07 (S=0,64) qui correspond à la valeur moyenne obtenue aux échelles « Qualité Pragmatique » et « Attractivité Globale »; et y=1,09 (S=0,53) qui correspond à la valeur moyenne obtenue aux échelles « Qualité Hédonique Stimulation » et « Identité ». En regardant par le prisme de nos 29 modalités, Nous observons que le nuage de points est plutôt homogène, mais certaines modalités (cf Figure) obtiennent des valeurs plus extrêmes par rapport à notre échantillon de base. Tout d'abord nous pouvons observer que le groupe d'enseignants s'écarte significativement (p=0,0564, ddl=28) du groupe des élèves (Test de Student bilatacuteral; alpha=0,05), évaluant globalement la plateforme comme plus « orientée vers le soi » mais principalement causé par un score plus faible sur l'axe x noté P « qualité pragmatique » (p=0,00002, ddl=14) (sur l'axe y noté H « qualité hédonique » p=0.7359, ddl=14). Ceci peut être induit par la stratégie de conception qui plaçait les besoins - et envies - de l'utilisateur au centre du développement. De plus l'enseignant adaptant le dispositif aux objectifs théoriques et pratiques qu'il s'est fixé, il semble cohérent que le score sur l'échelle pragmatique soit plus élevé chez les élèves, manipulant in fine le dispositif modifié par l'enseignant pour les besoins de la tâche ou du TP. Ensuite nous pouvons remarquer que le temps total d'utilisation de la plateforme modifie les résultats. Ainsi, manipuler le kit pour la première fois provoque une moyenne des réponses significativement plus neutre (p=0,0000), tandis que nous observons, pour le groupe l'ayant utilisé pendant plusieurs semaines, des valeurs significativement plus positives (p=0,0004) sur H; le groupe pratiquant depuis plusieurs mois est lui beaucoup plus proche de la la moyenne mais reste significativement différent sur P (p=0,0006) et donc plus « orienté vers la tâche ». De plus cette proximité avec la moyenne pourrait s'expliquer par l'effectif important de cette sous-catégorie d'élèves. Un autre fait remarquable se situe au niveau de la modalité « utilise le livret pédagogique fourni » et le groupe « Expert » qui obtiennent une évaluation similaire sur les deux échelles (p=0,9469) et qui est significativement différente de la moyenne sur H et P pour la modalité « livret » (p=0,0011) mais uniquement sur P (p=0,0039) pour les « experts ». Enfin nous observons que le groupe des collégiens possède la meilleure évaluation globale, même si, individuellement ces moyennes sur les différentes échelles ne correspondent pas systématiquement à la valeur maximale.
Commentaire : La répartition globale est plutôt bien localisée: la moyenne générale se situe à x=1,07 (S=0,64) qui correspond à la valeur moyenne obtenue aux échelles « Qualité Pragmatique » et « Attractivité Globale »; et y=1,09 (S=0,53) qui correspond à la valeur moyenne obtenue aux échelles « Qualité Hédonique Stimulation » et « Identité ». En regardant par le prisme de nos 29 modalités, Nous observons que le nuage de points est plutôt homogène, mais certaines modalités (cf Figure) obtiennent des valeurs plus extrêmes par rapport à notre échantillon de base. Tout d'abord nous pouvons observer que le groupe d'enseignants s'écarte significativement (p=0,0564, ddl=28) du groupe des élèves (Test de Student bilatacuteral; alpha=0,05), évaluant globalement la plateforme comme plus « orientée vers le soi » mais principalement causé par un score plus faible sur l'axe x noté P « qualité pragmatique » (p=0,00002, ddl=14) (sur l'axe y noté H « qualité hédonique » p=0.7359, ddl=14). Ceci peut être induit par la stratégie de conception qui plaçait les besoins - et envies - de l'utilisateur au centre du développement. De plus l'enseignant adaptant le dispositif aux objectifs théoriques et pratiques qu'il s'est fixé, il semble cohérent que le score sur l'échelle pragmatique soit plus élevé chez les élèves, manipulant in fine le dispositif modifié par l'enseignant pour les besoins de la tâche ou du TP. Ensuite nous pouvons remarquer que le temps total d'utilisation de la plateforme modifie les résultats. Ainsi, manipuler le kit pour la première fois provoque une moyenne des réponses significativement plus neutre (p=0,0000), tandis que nous observons, pour le groupe l'ayant utilisé pendant plusieurs semaines, des valeurs significativement plus positives (p=0,0004) sur H; le groupe pratiquant depuis plusieurs mois est lui beaucoup plus proche de la la moyenne mais reste significativement différent sur P (p=0,0006) et donc plus « orienté vers la tâche ». De plus cette proximité avec la moyenne pourrait s'expliquer par l'effectif important de cette sous-catégorie d'élèves. Un autre fait remarquable se situe au niveau de la modalité « utilise le livret pédagogique fourni » et le groupe « Expert » qui obtiennent une évaluation similaire sur les deux échelles (p=0,9469) et qui est significativement différente de la moyenne sur H et P pour la modalité « livret » (p=0,0011) mais uniquement sur P (p=0,0039) pour les « experts ». Enfin nous observons que le groupe des collégiens possède la meilleure évaluation globale, même si, individuellement ces moyennes sur les différentes échelles ne correspondent pas systématiquement à la valeur maximale.
Format : Figure, Image
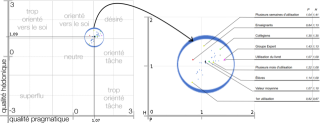
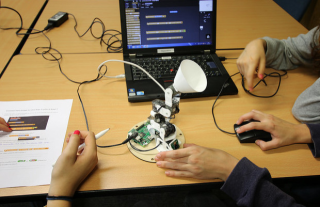
Commentaire : Le robot Poppy Ergo Jr (cf Figure) utilisé dans le dispositif Poppy Éducation est issu de la plateforme robotique Poppy (Lapeyre,2015) et en reprend donc les caractéristiques: cette plateforme est un ensemble de briques matérielles et logicielles open-source basé sur l’impression 3D, permettant de construire différents robots dont l’Ergo Jr, programmables avec de multiples langages (notamment Snap! -scratch like- et Python) grâce à une API REST. La modularité de la plateforme permet la conception et le partage de projets éducatifs et collaboratifs mettant en jeu des compétences variées, comme la manipulation de multiples technologies (e.g. impression et conception 3D, objet connecté, etc) permettant des connexions entre diverses disciplines, outils et matériaux d'une variété et d'une accessibilité toujours croissante (cf FabLab, MOOC). Pour plus d'information: https://www.poppy-education.org/
Commentaire : Le robot Poppy Ergo Jr (cf Figure) utilisé dans le dispositif Poppy Éducation est issu de la plateforme robotique Poppy (Lapeyre,2015) et en reprend donc les caractéristiques: cette plateforme est un ensemble de briques matérielles et logicielles open-source basé sur l’impression 3D, permettant de construire différents robots dont l’Ergo Jr, programmables avec de multiples langages (notamment Snap! -scratch like- et Python) grâce à une API REST. La modularité de la plateforme permet la conception et le partage de projets éducatifs et collaboratifs mettant en jeu des compétences variées, comme la manipulation de multiples technologies (e.g. impression et conception 3D, objet connecté, etc) permettant des connexions entre diverses disciplines, outils et matériaux d'une variété et d'une accessibilité toujours croissante (cf FabLab, MOOC). Pour plus d'information: https://www.poppy-education.org/
Format : Figure, Image
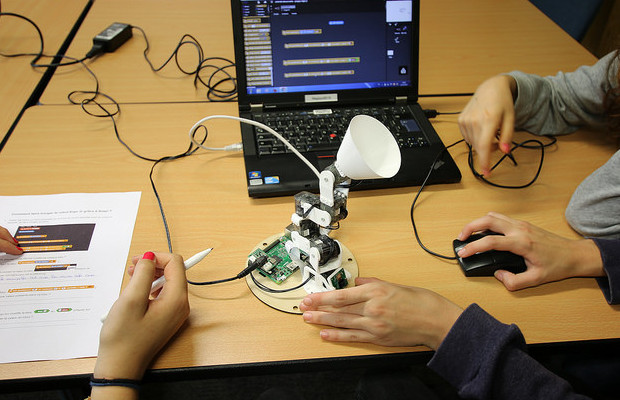
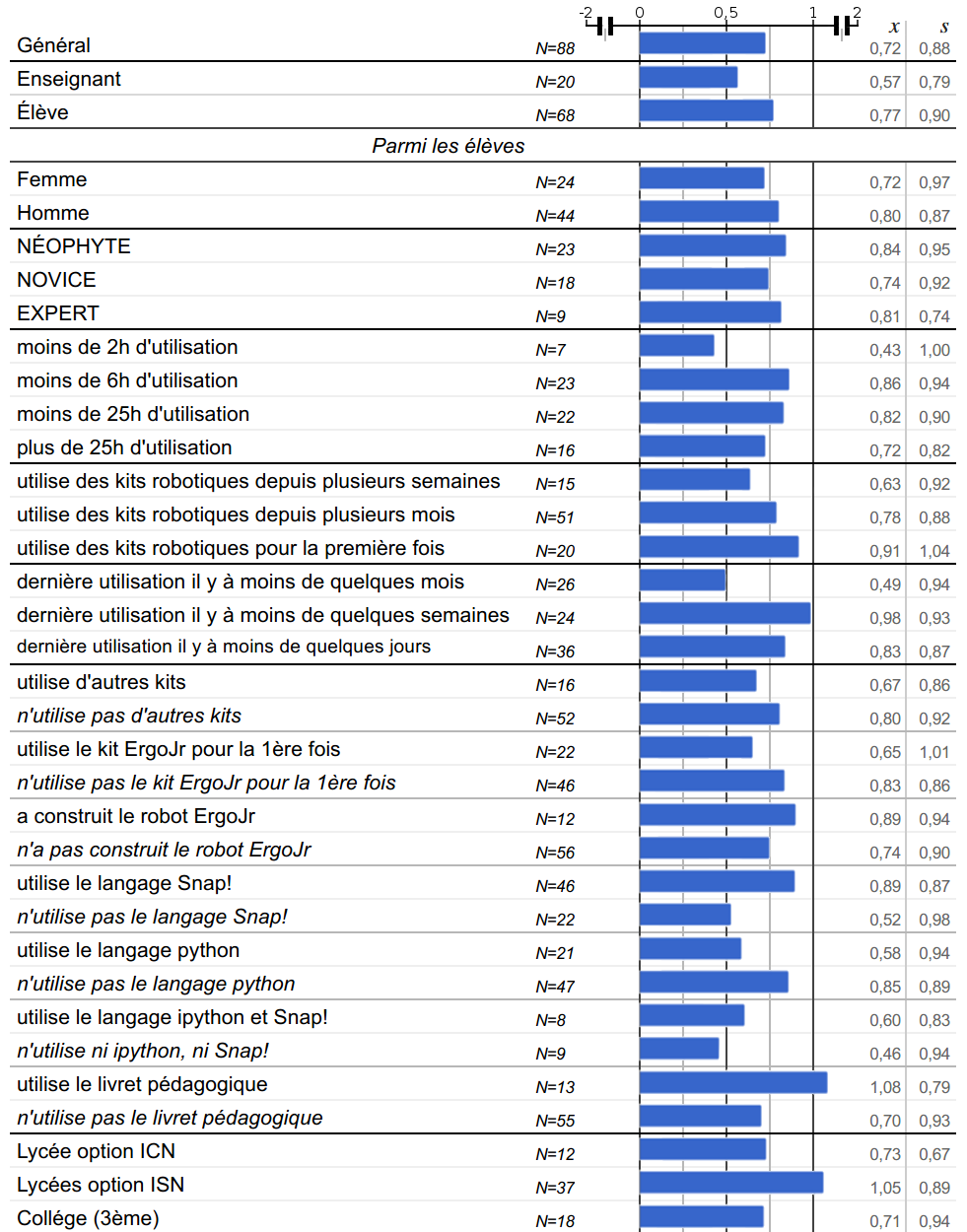
Commentaire : La rétrospective de 2013 du SUS (Brooke, 2013) nous apprend que le score moyen obtenu par des dispositifs au SUS est de 68/100 soit 0,72 sur l'intervalle [-2;2]. Dans notre étude, la moyenne générale a atteint 0,72: 0,57 pour les enseignants et 0,77 pour les élèves. Lorsque nous observons les résultats avec plus de détails, nous pouvons nous apercevoir (cf Figure) que certains usages font varier significativement le score du SUS de la moyenne (Test de Student bilatacuteeral; alpha=0,05; ddl=9), notamment: un temps d'utilisation inférieur à 2 heures (p=0,0238) ou une longue période entre la dernière utilisation du kit et le passage du questionnaire (p=0,0007) qui l'impacte négativement; l'utilisation du livret pédagogique (p=0,0004) qui l'impacte positivement; le choix du langage de programmation (Snap! p=0,0017; python p=0,0103; autre p=0,0019) ayant un impact relatif au choix effectué: positif pour Snap!, négatif pour python ou les autres langages (non natif). D'autre part, il est également intéressant d'observer les critères ne faisant pas varier significativement le score du SUS comme l'utilisation d'autres kits (p=0,3357) ou non (p=0,1683); la construction du robot (p=0,1029) ou non (p=0,2996); ou encore la distinction entre Enseignants/Élèves (p=0,1687) qui étaient des critères attendus comme discriminants. Cependant, concernant cette dernière, le faible effectif côté enseignants (N=20) peut expliquer l'absence de différence significative (cf 4.Limites & perspectives). Enfin, nous n'observons pas de distinction Homme/Femme (p=0,3740), comme il est courant de trouver dans d'autres disciplines.
Commentaire : La rétrospective de 2013 du SUS (Brooke, 2013) nous apprend que le score moyen obtenu par des dispositifs au SUS est de 68/100 soit 0,72 sur l'intervalle [-2;2]. Dans notre étude, la moyenne générale a atteint 0,72: 0,57 pour les enseignants et 0,77 pour les élèves. Lorsque nous observons les résultats avec plus de détails, nous pouvons nous apercevoir (cf Figure) que certains usages font varier significativement le score du SUS de la moyenne (Test de Student bilatacuteeral; alpha=0,05; ddl=9), notamment: un temps d'utilisation inférieur à 2 heures (p=0,0238) ou une longue période entre la dernière utilisation du kit et le passage du questionnaire (p=0,0007) qui l'impacte négativement; l'utilisation du livret pédagogique (p=0,0004) qui l'impacte positivement; le choix du langage de programmation (Snap! p=0,0017; python p=0,0103; autre p=0,0019) ayant un impact relatif au choix effectué: positif pour Snap!, négatif pour python ou les autres langages (non natif). D'autre part, il est également intéressant d'observer les critères ne faisant pas varier significativement le score du SUS comme l'utilisation d'autres kits (p=0,3357) ou non (p=0,1683); la construction du robot (p=0,1029) ou non (p=0,2996); ou encore la distinction entre Enseignants/Élèves (p=0,1687) qui étaient des critères attendus comme discriminants. Cependant, concernant cette dernière, le faible effectif côté enseignants (N=20) peut expliquer l'absence de différence significative (cf 4.Limites & perspectives). Enfin, nous n'observons pas de distinction Homme/Femme (p=0,3740), comme il est courant de trouver dans d'autres disciplines.
Loading...