Finding Good Configurations of Planar Primitives in Unorganized Point Clouds
Résumé
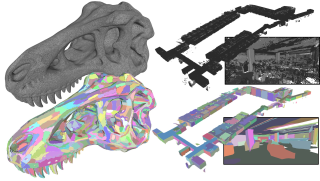
We present an algorithm for detecting planar primitives from unorganized 3D point clouds. Departing from an initial configuration, the algorithm refines both the continuous plane parameters and the discrete assignment of input points to them by seeking high fidelity, high simplicity and high completeness. Our key contribution relies upon the design of an exploration mechanism guided by a multiobjective energy function. The transitions within the large solution space are handled by five geometric operators that create, remove and modify primitives. We demonstrate the potential of our method on a variety of scenes, from organic shapes to man-made objects, and sensors, from multiview stereo to laser. We show its efficacy with respect to existing primitive fitting approaches and illustrate its applicative interest in compact mesh reconstruction, when combined with a plane assembly method.
Fichier principal
 CVPR22_Mulin.pdf (18.23 Mo)
Télécharger le fichier
CVPR22_Mulin.pdf (18.23 Mo)
Télécharger le fichier
 teaser_cvpr22.jpg (540.79 Ko)
Télécharger le fichier
CVPR22_Mulin_supplementary.pdf (11.18 Mo)
Télécharger le fichier
teaser_cvpr22.jpg (540.79 Ko)
Télécharger le fichier
CVPR22_Mulin_supplementary.pdf (11.18 Mo)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image