Ray-traced collision detection for deformable bodies
Résumé
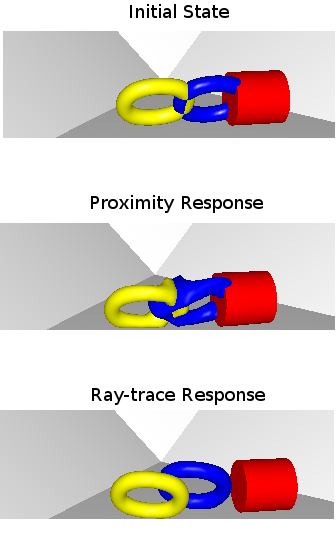
This paper presents a new approach to collision detection and modeling between deformable volumetric bod- ies. It allows deep intersections while alleviating the difficulties of distance field update. A ray is shot from each surface vertex in the direction of the inward normal. A collision is detected when the first intersection be- longs to an inward surface triangle of another body. A contact force between the vertex and the matching point is then created. Experiments show that this approach is fast and more robust than traditional proximity-based collisions.
Fichier principal
 grapp08.pdf (227.78 Ko)
Télécharger le fichier
grapp08.pdf (227.78 Ko)
Télécharger le fichier
 torus_separation.png (45.38 Ko)
Télécharger le fichier
TorusCyl.avi (226.52 Ko)
Télécharger le fichier
chain.avi (758.75 Ko)
Télécharger le fichier
torus_separation.png (45.38 Ko)
Télécharger le fichier
TorusCyl.avi (226.52 Ko)
Télécharger le fichier
chain.avi (758.75 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Autre
Format : Autre