HandNavigator: Hands-on Interaction for Desktop Virtual Reality
Résumé
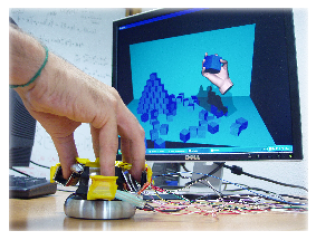
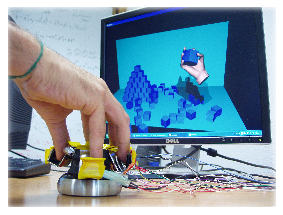
This paper presents a novel interaction system, aimed at hands-on manipulation of digital models through natural hand gestures. Our system is composed of a new physical interaction device coupled with a simulated compliant virtual hand model. The physical interface consists of a SpaceNavigator, augmented with pressure sensors to detect directional forces applied by the user's fingertips. This information controls the position, orientation, and posture of the virtual hand in the same way that the SpaceNavigator uses measured forces to animate a virtual frame. In this manner, user control does not involve fatigue due to reaching gestures or holding a desired hand shape. During contact, the user has a realistic visual feedback in the form of plausible interactions between the virtual hand and its environment. Our device is well suited to any situation where hand gesture, contact, or manipulation tasks need to be performed in virtual. We demonstrate the device in several simple virtual worlds and evaluate it through a series of user studies.
Fichier principal
 hn.pdf (4.1 Mo)
Télécharger le fichier
hn.pdf (4.1 Mo)
Télécharger le fichier
 pyramide.png (106.74 Ko)
Télécharger le fichier
pyramide.png (106.74 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image