Combining Physically-Based Simulation of Colliding Objects with Trajectory Control
Résumé
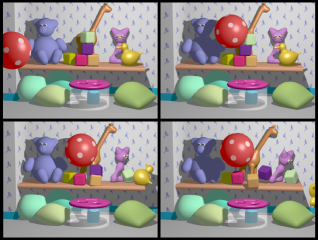
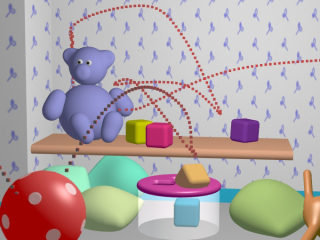
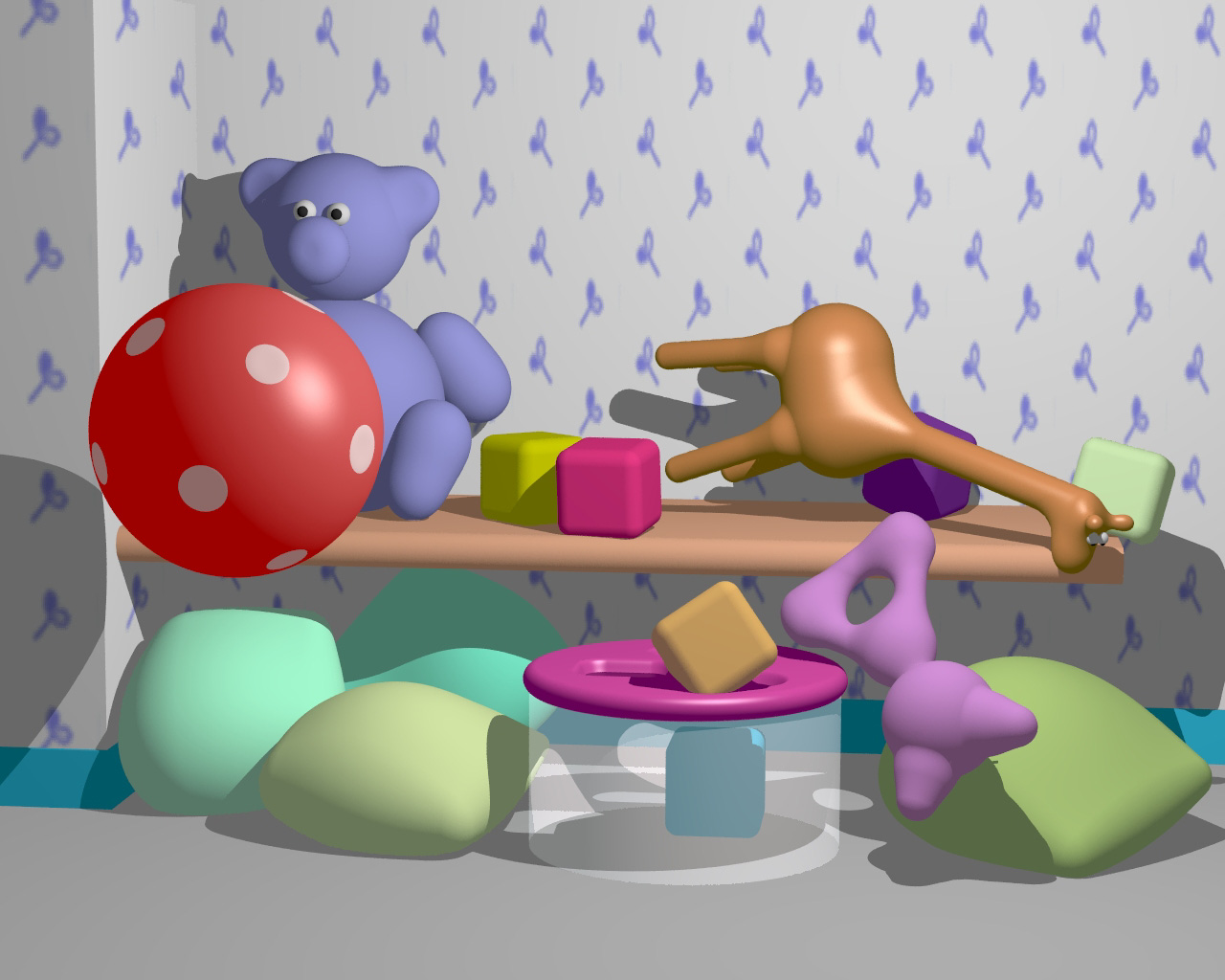
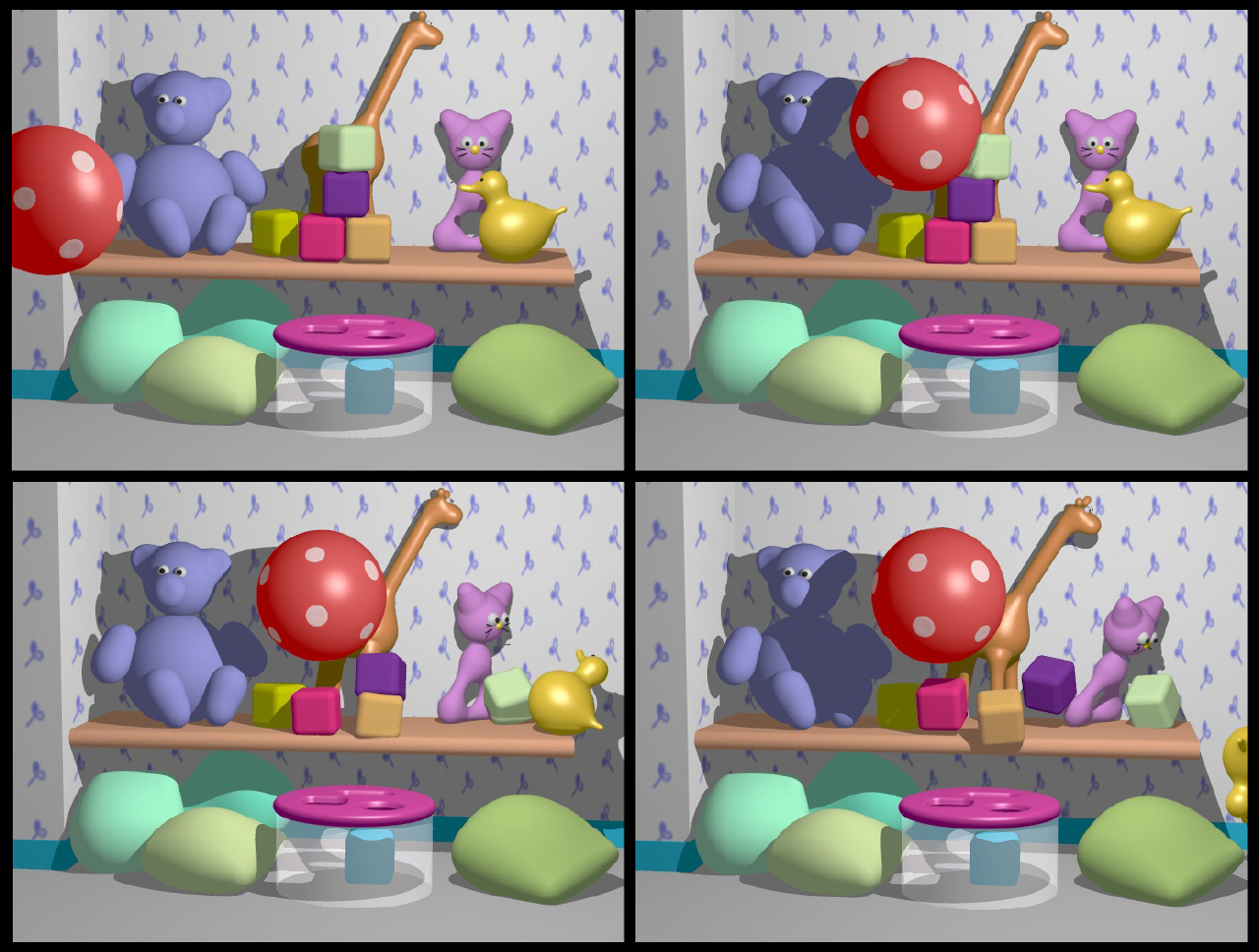
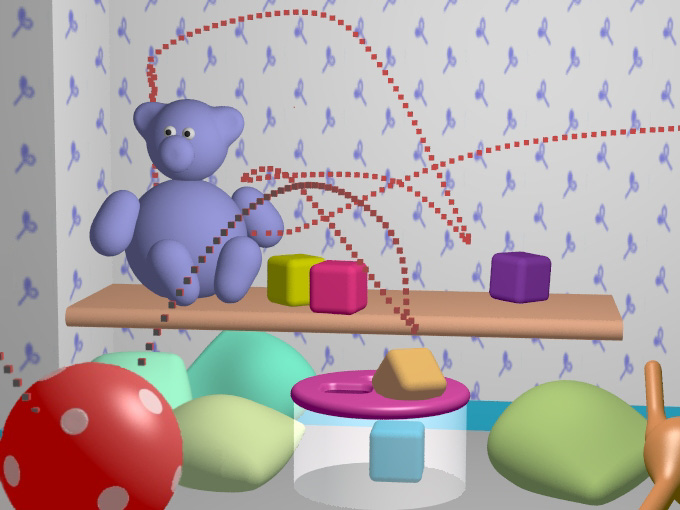
This paper describes a method that facilitates the use of physically based models by animators. The main point is to give the animator a familiar interface, while providing a simulation module which detects collisions thus enhancing realism. The user gives a set of key-frames to guide motion, but does not have to address problems such as interpenetration avoidance, deformations due to collisions, or realism of motion. The simulator will correct the trajectories and compute deformations according to each object's physical properties (such as mass, inertia, stiffness) as well as the collisions and contacts automatically detected during motion. To achieve this, objects are provided with actuators capable of generating forces and torques computed via generalized Proportional-Derivative controllers. When deflected by external actions, actuated objects try to return to their initial path. Speed variations over time are computed during the simulation, and depend on the complexity of the paths, on the objects' models, and on the events such as collisions occurring during motion. In addition simulations are generated at interactive rates, even in the case of complex articulated objects. This facilitates the fine tuning of an animation sequence.
Fichier principal
 vca95.pdf (344.06 Ko)
Télécharger le fichier
vca95.pdf (344.06 Ko)
Télécharger le fichier
 balchoc0_010.jpg (89.72 Ko)
Télécharger le fichier
balchoc0_010.jpg (89.72 Ko)
Télécharger le fichier
 balchoc0_035.jpg (88.68 Ko)
Télécharger le fichier
balchoc0_035.jpg (88.68 Ko)
Télécharger le fichier
 balchoc0_060.jpg (90.51 Ko)
Télécharger le fichier
balchoc0_060.jpg (90.51 Ko)
Télécharger le fichier
 balchoc0_145.jpg (200.88 Ko)
Télécharger le fichier
balchoc0_145.jpg (200.88 Ko)
Télécharger le fichier
 balchoc0_bd4.jpg (335.58 Ko)
Télécharger le fichier
balchoc0_bd4.jpg (335.58 Ko)
Télécharger le fichier
 montage_rebond.jpg (99.04 Ko)
Télécharger le fichier
vca95_no_img.pdf (168.08 Ko)
Télécharger le fichier
vca95_no_img.ps (953.93 Ko)
Télécharger le fichier
montage_rebond.jpg (99.04 Ko)
Télécharger le fichier
vca95_no_img.pdf (168.08 Ko)
Télécharger le fichier
vca95_no_img.ps (953.93 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Autre
Format : Autre
Loading...