A Simple Kinetic Visibility Polygon
Résumé
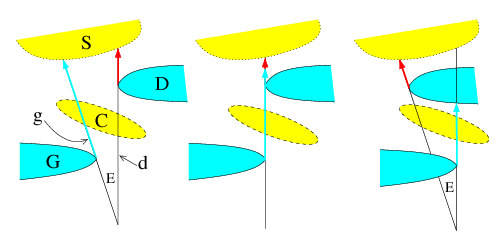
Given a set of moving obstacles in the plane, we propose a method for maintaining efficiently the visibility polygon of a (possibly moving) viewpoint. We consider both smooth-convex, and simply-polygonal obstacles.
Fichier principal
 vispoly.pdf (135.8 Ko)
Télécharger le fichier
vispoly.pdf (135.8 Ko)
Télécharger le fichier
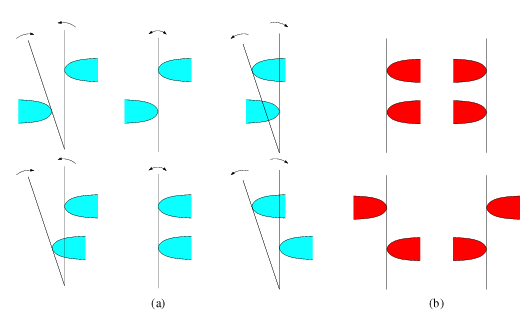
 events.png (12.69 Ko)
Télécharger le fichier
KVP.ppt (1.37 Mo)
Télécharger le fichier
demo1.mpg (2.51 Mo)
Télécharger le fichier
events.png (12.69 Ko)
Télécharger le fichier
KVP.ppt (1.37 Mo)
Télécharger le fichier
demo1.mpg (2.51 Mo)
Télécharger le fichier
 updates.png (14.08 Ko)
Télécharger le fichier
updates.png (14.08 Ko)
Télécharger le fichier
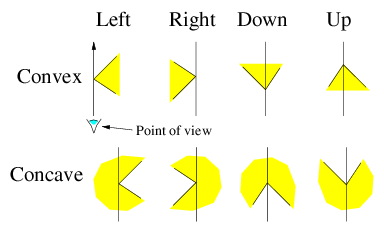
 vertices.png (9.31 Ko)
Télécharger le fichier
vertices.png (9.31 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Autre
Format : Autre
Format : Figure, Image
Format : Figure, Image