QP-Collide: A New Approach to Collision Treatment
Résumé
Robust handling of collisions and contacts is important in physics-based animation and simulation scenarios. We present a new approach which handles dynamics and collision treatment simultaneously. We consider the collisions as linear constraints and the dynamics equation as an ob- jective function to be minimized. We thus get a unied equation modeled as a quadratic programming (QP) problem and solve it using an active set method. We iterate the QP until the solution satises all the constraints with the appropriate sign of the Lagrange's multipliers. Thus we get a solu- tion to the dynamics equation which responds to all the collisions. Other constraints such as assigning a constant velocity to a particle, limiting strain/strain rate, etc. too can be easily modeled as linear constraints. In this paper, we describe in detail on how such an approach can be integrated within an existing dynamics simulation environment. In addition, we also include implementation difficulties of this approach and discuss practical tricks to overcome the same.
Fichier principal
 raghupathi_faure_gtas_soumission.pdf (180.69 Ko)
Télécharger le fichier
raghupathi_faure_gtas_soumission.pdf (180.69 Ko)
Télécharger le fichier
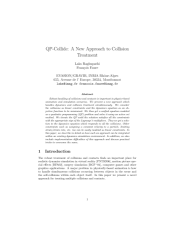
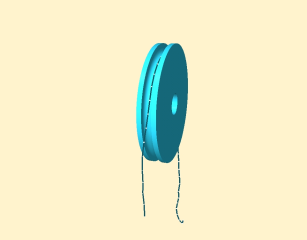
 cylindre_40_particles.jpg (115.18 Ko)
Télécharger le fichier
cyl2.mpg (2.29 Mo)
Télécharger le fichier
gtas06.pdf (755.81 Ko)
Télécharger le fichier
gtas06.ppt (1.8 Mo)
Télécharger le fichier
gtas061.pdf (755.81 Ko)
Télécharger le fichier
cylindre_40_particles.jpg (115.18 Ko)
Télécharger le fichier
cyl2.mpg (2.29 Mo)
Télécharger le fichier
gtas06.pdf (755.81 Ko)
Télécharger le fichier
gtas06.ppt (1.8 Mo)
Télécharger le fichier
gtas061.pdf (755.81 Ko)
Télécharger le fichier
 poulie_40_particles.jpg (59.33 Ko)
Télécharger le fichier
pull1.mpg (3.62 Mo)
Télécharger le fichier
poulie_40_particles.jpg (59.33 Ko)
Télécharger le fichier
pull1.mpg (3.62 Mo)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Autre
Format : Autre
Format : Autre
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Autre