Multi-View Object Class Detection with a 3D Geometric Model
Résumé
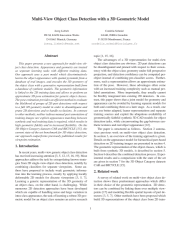
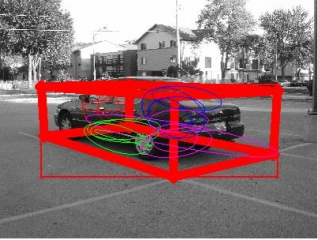
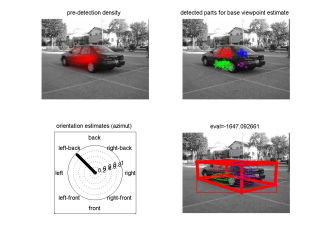
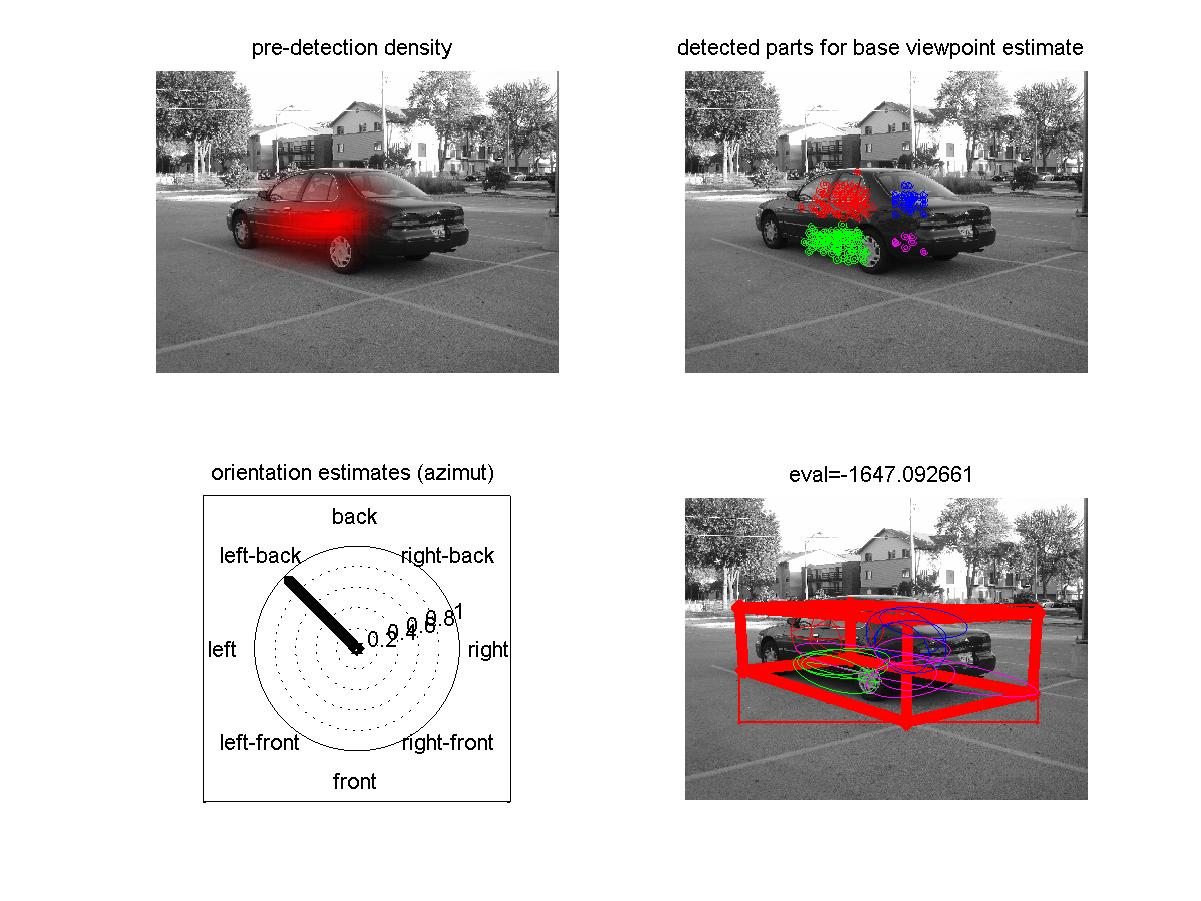
This paper presents a new approach for multi-view object class detection. Appearance and geometry are treated as separate learning tasks with different training data. Our approach uses a part model which discriminatively learns the object appearance with spatial pyramids from a database of real images, and encodes the 3D geometry of the object class with a generative representation built from a database of synthetic models. The geometric information is linked to the 2D training data and allows to perform an approximate 3D pose estimation for generic object classes. The pose estimation provides an efficient method to evaluate the likelihood of groups of 2D part detections with respect to a full 3D geometry model in order to disambiguate and prune 2D detections and to handle occlusions. In contrast to other methods, neither tedious manual part annotation of training images nor explicit appearance matching between synthetic and real training data is required, which results in high geometric fidelity and in increased flexibility. On the 3D Object Category datasets CAR and BICYCLE, the current state-of-the-art benchmark for 3D object detection, our approach outperforms previously published results for viewpoint estimation.
Fichier principal
 cvpr_1423.pdf (2.35 Mo)
Télécharger le fichier
cvpr_1423.pdf (2.35 Mo)
Télécharger le fichier
 1423.jpg (64.16 Ko)
Télécharger le fichier
1423.jpg (64.16 Ko)
Télécharger le fichier
 cvpr_1423.jpg (137.22 Ko)
Télécharger le fichier
cvpr_1423.jpg (137.22 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Loading...