Free-Form Mesh Tracking: a Patch-Based Approach
Résumé
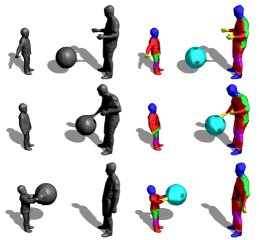
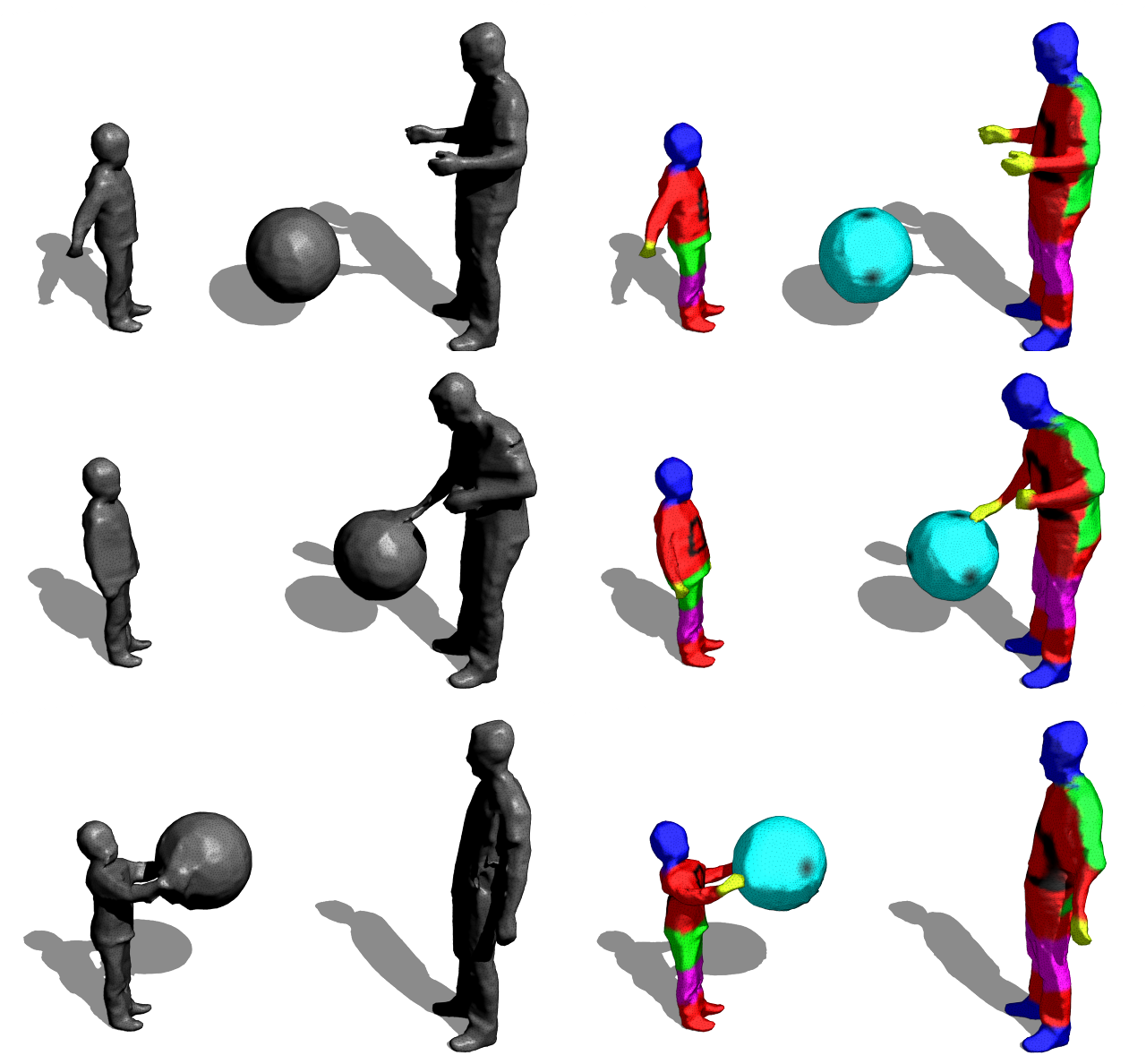
In this paper, we consider the problem of tracking non-rigid surfaces and propose a generic data-driven mesh deformation framework. In contrast to methods using strong prior models, this framework assumes little on the observed surface and hence easily generalizes to most free-form surfaces while effectively handling large deformations. To this aim, the reference surface is divided into elementary surface cells or patches. This strategy ensures robustness by providing natural integration domains over the surface for noisy data, while enabling to express simple patch-level rigidity constraints. In addition, we associate to this scheme a robust numerical optimization that solves for physically plausible surface deformations given arbitrary constraints. In order to demonstrate the versatility of the proposed framework, we conducted experiments on open and closed surfaces, with possibly non-connected components, that undergo large deformations and fast motions. We also performed quantitative and qualitative evaluations in multi-cameras and monocular environments, and with different types of data including 2D correspondences and 3D point clouds.
Fichier principal
 cagniart2010CVPR.pdf (872.4 Ko)
Télécharger le fichier
cagniart2010CVPR.pdf (872.4 Ko)
Télécharger le fichier
 results_ballon.png (480 Ko)
Télécharger le fichier
results_ballon.png (480 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...