3DPO: A Three Dimensional Part Orientation System
Résumé
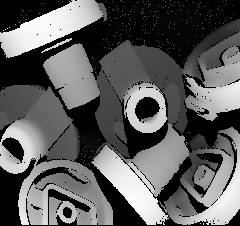
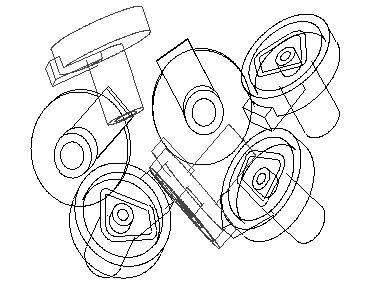
In this paper, we present a system that recognizes objects in a jumble, verifies them, and then determines some essential configurational information, such as which ones are on top. The approach is to use three-dimensional models of the objects to find them in range data. The matching strategy starts with a distinctive edge feature, such as the edge at the end of a cylindrical part, and then "grows" a match by add ing compatible features one at a time. (The order of features to be considered is predetermined by an interactive, off-line, feature-selection process.) Once a sufficient number of com patible features has been detected to allow a hypothesis to be formed, the verification procedure evaluates it by comparing the measured range data with data predicted according to the hypothesis. When all the objects in the scene have been hy pothesized and verified in this manner, a configuration- understanding procedure determines which objects are on top of others by analyzing the patterns of range data predicted from all the hypotheses. We also present experimental results of the system's performance in recognizing and locating castings in a bin.
Fichier principal
 BollesHoraud-IJRR86.pdf (1.99 Mo)
Télécharger le fichier
BollesHoraud-IJRR86.pdf (1.99 Mo)
Télécharger le fichier
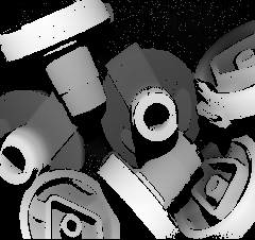 casting-rangedata.jpg (13.67 Ko)
Télécharger le fichier
casting-rangedata.jpg (13.67 Ko)
Télécharger le fichier
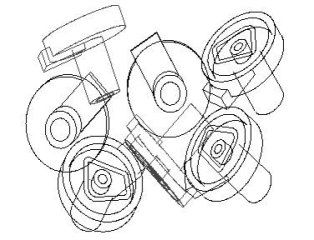 castings-localization.jpg (26.19 Ko)
Télécharger le fichier
castings-localization.jpg (26.19 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers éditeurs autorisés sur une archive ouverte
Format : Figure, Image
Format : Figure, Image