Human Motion Tracking with a Kinematic Parameterization of Extremal Contours
Résumé
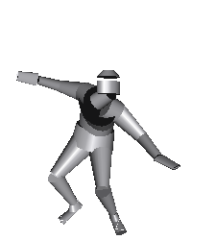
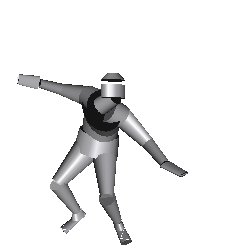
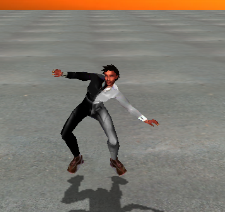
This paper addresses the problem of human motion tracking from multiple image sequences. The human body is described by five articulated mechanical chains and human body-parts are described by volumetric primiti ves with curved surfaces. If such a surface is observed with a camera, an extremal contour appears in the image whenever the surface turns smoothly away from the viewer. We describe a method that recovers human motion through a kinematic parameterization of these extremal contours. The method exploits the fact that the observed image motion of these contours is a function of both the rigid displacement of the surface and of the relative position and orientation between the viewer and the curved surface. First, we describe a parameterization of an extremal-contour point velocity for the case of developable surfaces. Second, we use the zero-reference kinematic representation and we derive an explicit formula that links extremal contour velocities to the angular velocities associated with the kinematic model. Third, we show how the chamfer-distance may be used to measure the discrepancy between predicted extremal contours and observed image contours; Moreover we show how the chamfer distance can be used as a differentiable multi-valued function and how the tracker based on this distance can be cast into a continuous non-linear optimization framework. Fourth, we describe implementation issues associated with a practical human-body tracker that may use an arbitrary number of cameras. One great methodological and practical advantage of our method is that it relies neither on model-to-image, nor on image-to-image point matches. In practice we model people with 5 kinematic chains, 19 volumetric primitives, and 54 degrees of freedom; We observe silhouettes in images gathered with several synchronized and calibrated cameras. The tracker has been successfully applied to several complex motions gathered at 30 frames/second.
Fichier principal
 KnossowRonfardHoraud-IJCV08.pdf (1.85 Mo)
Télécharger le fichier
KnossowRonfardHoraud-IJCV08.pdf (1.85 Mo)
Télécharger le fichier
 FC-3D-100-C.png (17.35 Ko)
Télécharger le fichier
FC-3D-100-C.png (17.35 Ko)
Télécharger le fichier
 FC-Actor-100-C.png (88.96 Ko)
Télécharger le fichier
FC-Actor-100-C.png (88.96 Ko)
Télécharger le fichier
 FC-Orig-100-I.png (138.27 Ko)
Télécharger le fichier
crawl.avi (1.99 Mo)
Télécharger le fichier
taekwondo.avi (721.11 Ko)
Télécharger le fichier
FC-Orig-100-I.png (138.27 Ko)
Télécharger le fichier
crawl.avi (1.99 Mo)
Télécharger le fichier
taekwondo.avi (721.11 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Autre
Format : Autre
Loading...