SOFA: A Multi-Model Framework for Interactive Physical Simulation
Résumé
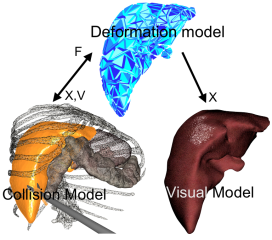
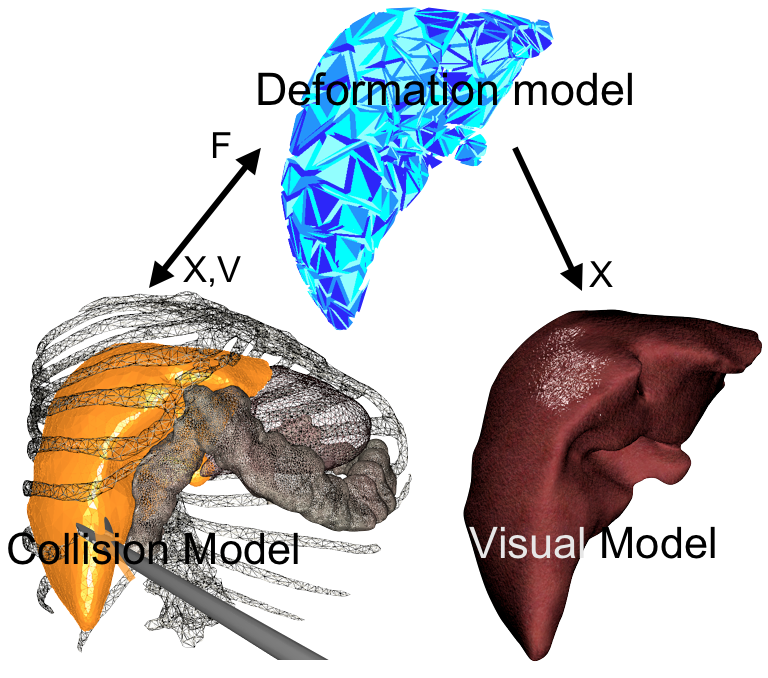
SOFA (Simulation Open Framework Architecture) is an open-source C++ library primarily targeted at interactive computational medical simulation. SOFA facilitates collaborations between specialists from various domains, by decomposing complex simulators into components designed independently and organized in a scenegraph data structure. Each component encapsulates one of the aspects of a simulation, such as the degrees of freedom, the forces and constraints, the differential equations, the main loop algorithms, the linear solvers, the collision detection algorithms or the interaction devices. The simulated objects can be represented using several models, each of them optimized for a different task such as the computation of internal forces, collision detection, haptics or visual display. These models are synchronized during the simulation using a mapping mechanism. CPU and GPU implementations can be transparently combined to exploit the computational power of modern hardware architectures. Thanks to this flexible yet efficient architecture, \sofa{} can be used as a test-bed to compare models and algorithms, or as a basis for the development of complex, high-performance simulators.
Fichier principal
 main.pdf (2.35 Mo)
Télécharger le fichier
main.pdf (2.35 Mo)
Télécharger le fichier
 NewLiverMap.png (499.48 Ko)
Télécharger le fichier
NewLiverMap.png (499.48 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...