High Fidelity Haptic Rendering for Deformable Objects Undergoing Topology Changes
Résumé
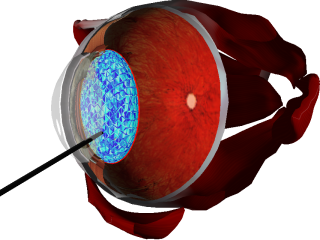
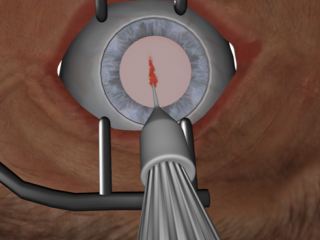
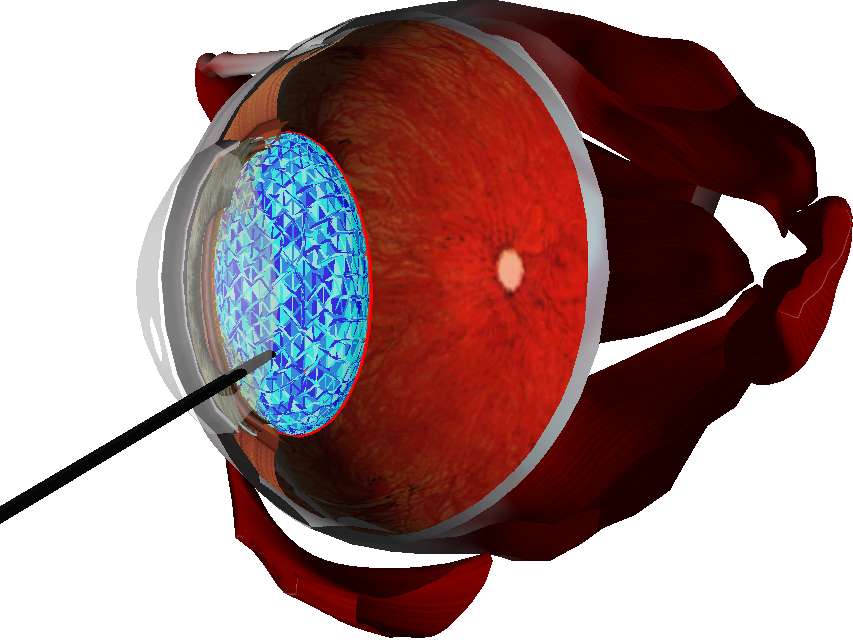
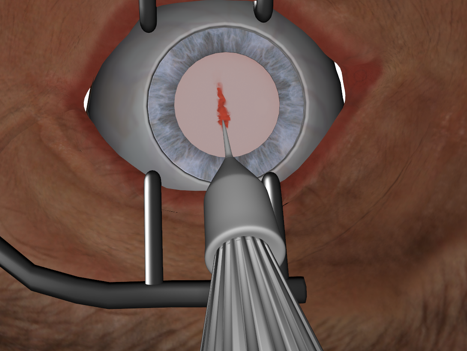
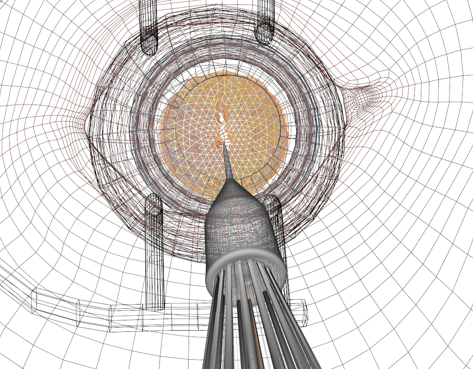
The relevance of haptic feedback for minimally invasive surgery has been demonstrated at numerous counts. However, the proposed methods often prove inadequate to handle correct contact computation during the complex interactions or topological changes that can be found in surgical interventions. In this paper, we introduce an approach that allows for accurate computation of contact forces even in the presence of topological changes due to the simulation of soft tissue cutting. We illustrate this approach with a simulation of cataract surgery, a typical example of microsurgery.
Fichier principal
 eurohaptics10-topology-changes-preprint.pdf (538.08 Ko)
Télécharger le fichier
eurohaptics10-topology-changes-preprint.pdf (538.08 Ko)
Télécharger le fichier
 eye-mesh.png (315.86 Ko)
Télécharger le fichier
eye-mesh.png (315.86 Ko)
Télécharger le fichier
 eye-phaco.png (188.65 Ko)
Télécharger le fichier
eye-phaco.png (188.65 Ko)
Télécharger le fichier
 eye-wireframe.png (273.4 Ko)
Télécharger le fichier
eye-wireframe.png (273.4 Ko)
Télécharger le fichier
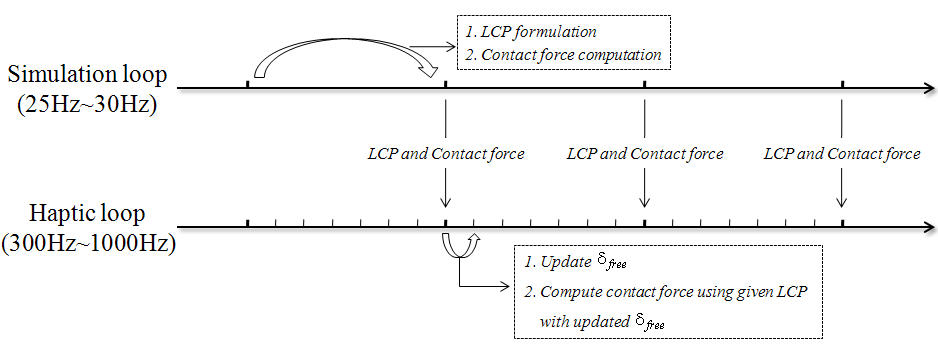
 haptic-loop.png (11.32 Ko)
Télécharger le fichier
haptic-loop.png (11.32 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Loading...