Camera cooperation for achieving visual attention
Résumé
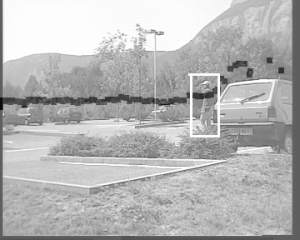
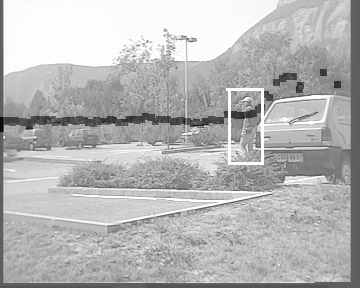
In this report we address the problem of establishing a computational model for visual attention using cooperation between two cameras. More specifically we wish to maintain a visual event within the field of view of a rotating and zooming camera through the understanding and modelling of the geometric and kinematic coupling between a static camera and an active camera. The static camera has a wide field of view thus allowing panoramic surveillance at low resolution. High-resolution details may be captured by a second camera, provided that it looks in the right direction. We derive an algebraic formulation for the coupling between the two cameras and we specify the practical conditions yielding a unique solution. We describe a method for separating a foreground event (such as a moving object) from its background while the camera rotates. A set of outdoor experiments shows the two-camera system in operation.
Fichier principal
 RR-5216.pdf (236.57 Ko)
Télécharger le fichier
RR-5216.pdf (236.57 Ko)
Télécharger le fichier
 wide.jpg (69.94 Ko)
Télécharger le fichier
wide.jpg (69.94 Ko)
Télécharger le fichier
 zoom.jpg (67.77 Ko)
Télécharger le fichier
zoom.jpg (67.77 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Format : Figure, Image
Format : Figure, Image