A Volumetric Reconstruction Method from Multiple Calibrated Views using Global Graph Cut Optimization
Résumé
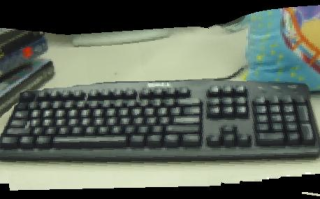
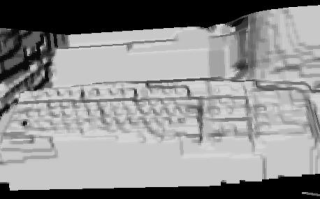
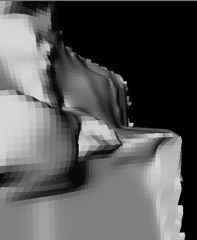
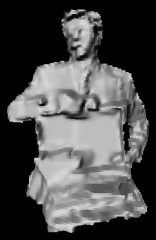
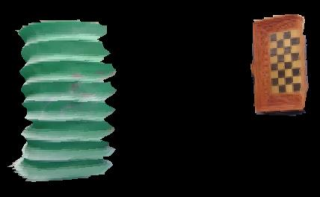
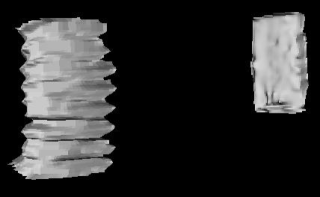
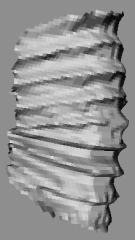
In this paper, a new formulation and solution to volumetric reconstruction from multiple calibrated images is presented. This problem has been previously formulated either as a continuous geometric optimization process driven by local numerical methods, or as a discrete labelling problem solved by global techniques for computing only stereo disparities. Our new formulation builds a bridge between these two approaches and takes advantage of both: a continuous geometric functional is minimized up to a discretization by a global graph cut algorithm. The relation between the continuous and discrete formulations is straightforwardly established. The minimization operates on a 3D embedded graph whose minimal cut is a solution of the discrete problem, leading to a global minimum. This new approach handling both occlusions and discontinuities has been demonstrated on real sequences, giving remarkably detailed surface geometry up to 1/10th pixel.
Domaines
Autre [cs.OH]
Fichier principal
 RR-4843.pdf (569.15 Ko)
Télécharger le fichier
RR-4843.pdf (569.15 Ko)
Télécharger le fichier
 clavier.jpg (19.61 Ko)
Télécharger le fichier
clavier.jpg (19.61 Ko)
Télécharger le fichier
 clavier_blanc.jpg (16.15 Ko)
Télécharger le fichier
clavier_blanc.jpg (16.15 Ko)
Télécharger le fichier
 disc_zoom_blank.jpg (14.6 Ko)
Télécharger le fichier
disc_zoom_blank.jpg (14.6 Ko)
Télécharger le fichier
 disc_zoom_clr.jpg (15.25 Ko)
Télécharger le fichier
disc_zoom_clr.jpg (15.25 Ko)
Télécharger le fichier
 homme.jpg (15.28 Ko)
Télécharger le fichier
homme.jpg (15.28 Ko)
Télécharger le fichier
 homme_blanc.jpg (14.07 Ko)
Télécharger le fichier
homme_blanc.jpg (14.07 Ko)
Télécharger le fichier
 lampion.jpg (10.1 Ko)
Télécharger le fichier
lampion.jpg (10.1 Ko)
Télécharger le fichier
 lampion_blanc.jpg (8.89 Ko)
Télécharger le fichier
lampion_blanc.jpg (8.89 Ko)
Télécharger le fichier
 lantern_blank.jpg (13.65 Ko)
Télécharger le fichier
lantern_blank.jpg (13.65 Ko)
Télécharger le fichier
 lantern_color.jpg (13.7 Ko)
Télécharger le fichier
lantern_color.jpg (13.7 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Loading...