Modal Locomotion: Controlling Passive Elastic Dynamics
Résumé
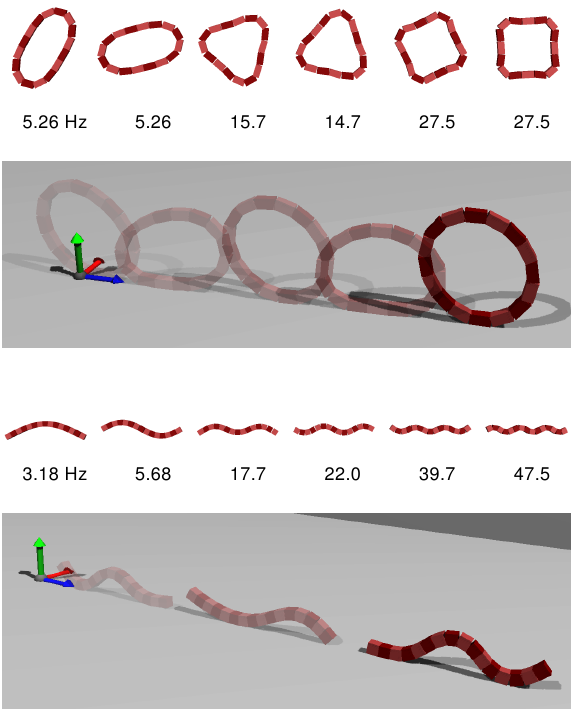
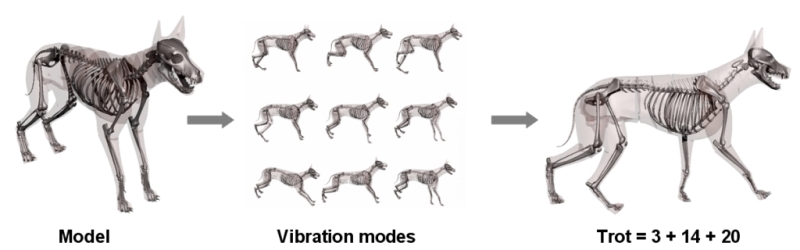
We present a general method to intuitively create a wide range of locomotion controllers for 3D legged characters. The key of our approach is the assumption that efficient locomotion can exploit the natural vibration modes of the body, where these modes are related to morphological parameters such as the shape, size, mass, and joint stiffness. The vibration modes are computed for a mechanical model of any 3D character with rigid bones, elastic joints, and additional constraints as desired. A small number of vibration modes can be selected with respect to their relevance to locomotion patterns and combined into a compact controller driven by very few parameters. We show that these controllers can be used in dynamic simulations of simple creatures, and for kinematic animations of more complex creatures of a variety of shapes and sizes.
Fichier principal
 ml-final.pdf (782.31 Ko)
Télécharger le fichier
ml-final.pdf (782.31 Ko)
Télécharger le fichier
 ml.png (88.12 Ko)
Télécharger le fichier
ml.png (88.12 Ko)
Télécharger le fichier
 ModalLocomotionRepresentativeImageSketch.jpg (65.81 Ko)
Télécharger le fichier
ml-sketch.pdf (1.22 Mo)
Télécharger le fichier
ModalLocomotionRepresentativeImageSketch.jpg (65.81 Ko)
Télécharger le fichier
ml-sketch.pdf (1.22 Mo)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Autre