Design of an immersive peripheral for object grasping
Résumé
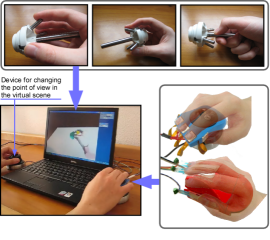
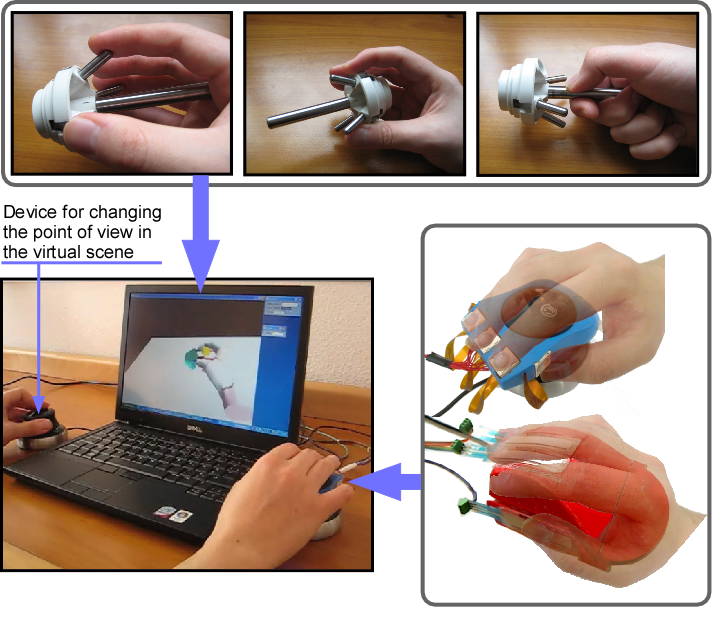
During product development processes, simulations involving user's grasping operations are of increasing interest to incorporate more quantitative information in DFA (Design For Assembly) or immersive simulations. We present several prototypes of an immersive peripheral device for controlling a virtual hand with fine dexterity. These prototypes are derived from the analysis of a grasping action to define the structure and main features of this device. The prototypes, as easy to manipulate as a computer mouse, enable the simultaneous control of a large number of degrees of freedom (dofs). The design issues, where physical phenomena, physiological behavior and device structure are all tightly combined and significantly influence the overall interaction, are reviewed. These issues include the generation of dofs, monitoring kinematics, force reduction during virtual hand and finger movements, and the influence of device design, sensor types and their placement on the interaction and on the range of configurations that can be achieved for grasping tasks, dexterity, and performance. Examples of grasping tasks show the effect of these immersive devices to reach user-friendly and efficient interactions with objects bringing new insight to the interaction with virtual products.
Fichier principal
 ASME2010_v1.pdf (1.09 Mo)
Télécharger le fichier
ASME2010_v1.pdf (1.09 Mo)
Télécharger le fichier
 HN_PorteSat.png (630.13 Ko)
Télécharger le fichier
HN_PorteSat.png (630.13 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...