Erosion Based Visibility Preprocessing
Résumé
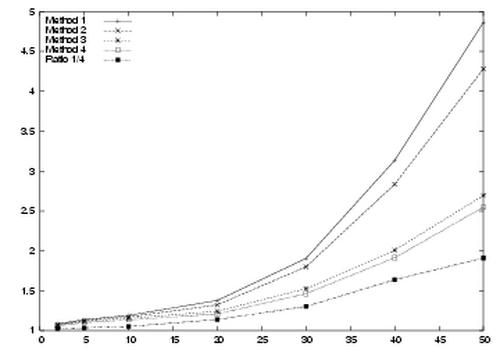
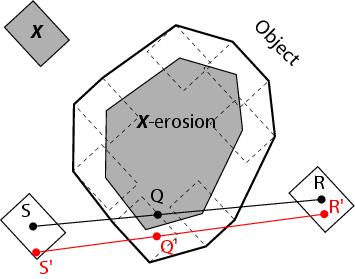
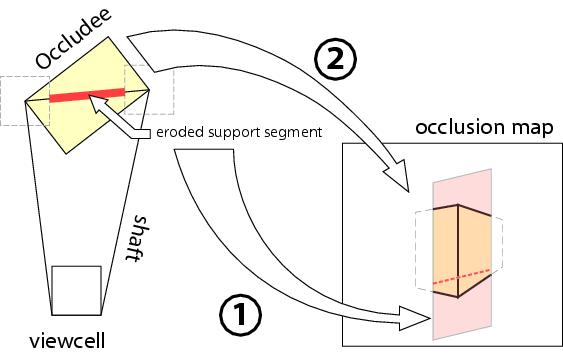
This paper presents a novel method for computing visibility in 2.5D environments. It is based on a novel theoretical result: the visibility from a region can be conservatively estimated by computing the visibility from a point using appropriately "shrunk" occluders and occludees. We show how approximated but yet conservative shrunk objects can efficiently be computed in a urban environment. The application of this theorem provides a tighter potentially visible set (PVS) than the original method it is built on. Finally, theoretical implications of the theorem are discussed, and we believe it can open new research directions.
Fichier principal
 erosion.pdf (193 Ko)
Télécharger le fichier
erosion.pdf (193 Ko)
Télécharger le fichier
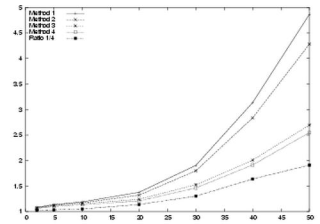 results.jpg (12.66 Ko)
Télécharger le fichier
results.jpg (12.66 Ko)
Télécharger le fichier
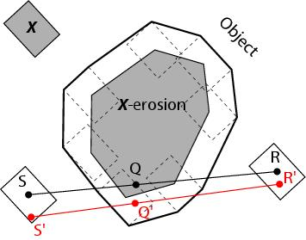 reduction.jpg (15.31 Ko)
Télécharger le fichier
reduction.jpg (15.31 Ko)
Télécharger le fichier
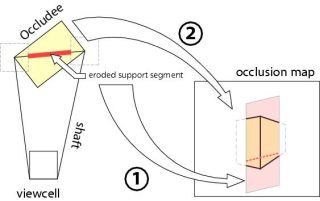 stencil.jpg (22.75 Ko)
Télécharger le fichier
stencil.jpg (22.75 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Loading...