Disparity and normal estimation through alternating maximization
Abstract
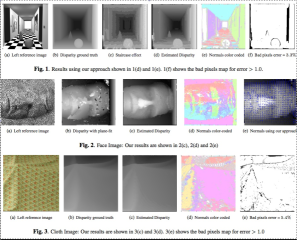
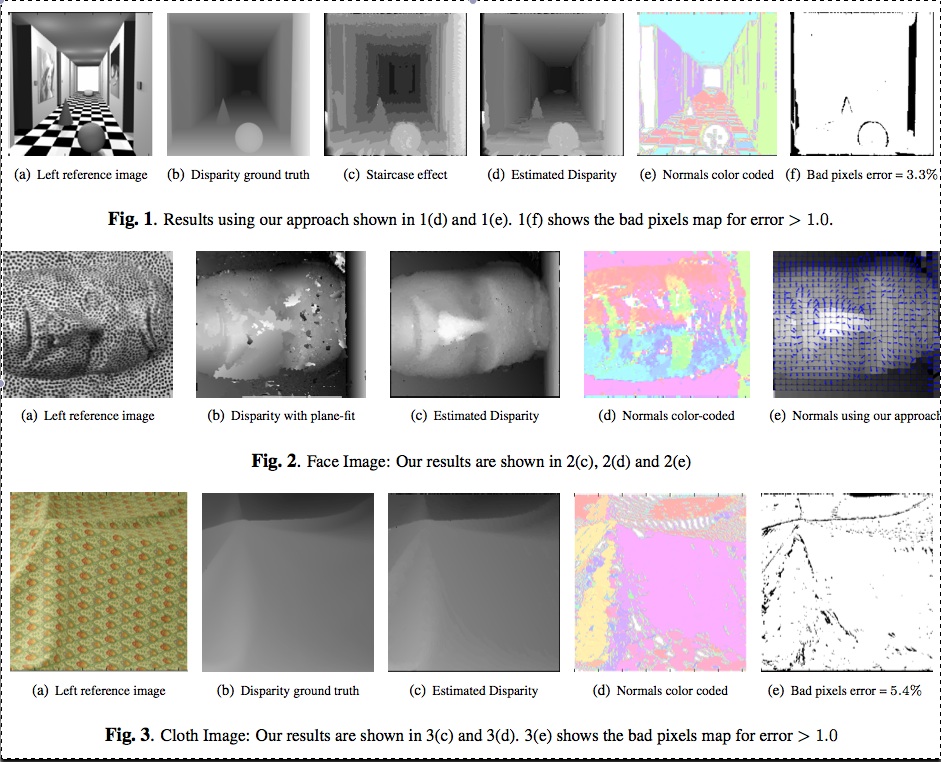
In this paper, we propose an algorithm that recovers binocular disparities in accordance with the surface properties of the scene under consideration. To do so, we estimate the disparity as well as the normals in the disparity space, by setting the two tasks in a unified framework. A novel joint probabilistic model is defined through two random fields to favor both intra field (within neighboring disparities and neighboring normals) and inter field (between disparities and normals) consistency. Geometric contextual information is introduced in the models for both normals and disparities, which is optimized using an appropriate alternating maximization procedure. We illustrate the performance of our approach on synthetic and real data.
Fichier principal
 icip10_final3382.pdf (1001.69 Ko)
Télécharger le fichier
icip10_final3382.pdf (1001.69 Ko)
Télécharger le fichier
 surfaces.jpg (258.17 Ko)
Télécharger le fichier
ramya_icip10_poster.pdf (1.98 Mo)
Télécharger le fichier
surfaces.jpg (258.17 Ko)
Télécharger le fichier
ramya_icip10_poster.pdf (1.98 Mo)
Télécharger le fichier
{kind=link}
Origin : Files produced by the author(s)
Format : Figure, Image
Format : Other