Grasp Recognition and Manipulation with the Tango
Résumé
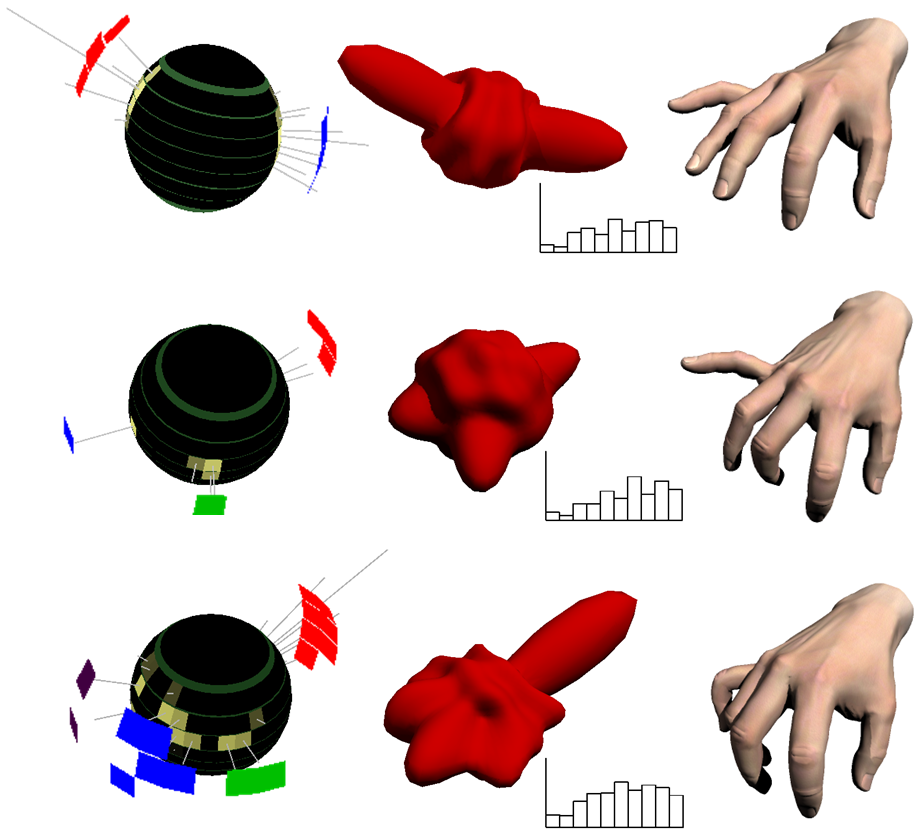
We describe an interface that uses a graspable device called the Tango, which looks like a ball but measures contact pressures on its surface at 256 tactual elements (taxels) at a high rate (100 Hz). The acceleration of the device is also measured. The key idea is to use this information to recognize the shape and movement of the user's hand grasping the object, with the vision that such a system would make it much easier to program interaction with 3D objects. We describe a new rotationally invariant algorithm for recognizing hand configuration, by using examples of previous interaction collected with motion capture. The recognition method is sufficiently fast for interactive manipulation. We also describe examples of 3D interaction using our system, in which the user interacts with 3D virtual objects using a hand avatar. Using this interface, the user can grasp an object, rotate it in 3D, transport it to a different location, and place it, with the ease and simplicity approaching that of handling a simple mouse. In the future, such tangible interfaces could be used for programming robots by demonstration or for model-based telerobotics.
Fichier principal
 iser.pdf (2.4 Mo)
Télécharger le fichier
iser.pdf (2.4 Mo)
Télécharger le fichier
 figure.png (273.61 Ko)
Télécharger le fichier
figure.png (273.61 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image