Virtual Clay for Direct Hand Manipulation
Résumé
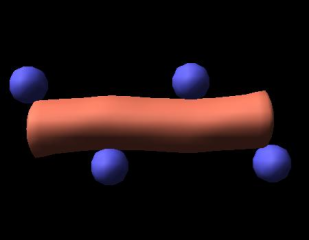
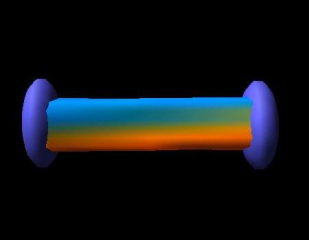
In order to make virtual modeling as easy as real clay manipulation, we describe a realtime virtual clay model, specially designed for direct hand manipulation. We build on a previous layered model for clay, extending it to handle local properties such as colour or fluidity, to deal with an arbitrary number of tools, and to capture twist effects due to rotating tools. The resulting clay model is the first step towards a more long term goal, namely direct interaction through video tracking of the user's hands.
Fichier principal
 DC04.pdf (203.22 Ko)
Télécharger le fichier
DC04.pdf (203.22 Ko)
Télécharger le fichier
 DC04_00.jpg (4.89 Ko)
Télécharger le fichier
DC04_00.jpg (4.89 Ko)
Télécharger le fichier
 DC04_01.jpg (6.03 Ko)
Télécharger le fichier
DC04_01.jpg (6.03 Ko)
Télécharger le fichier
 DC04_02.jpg (4.97 Ko)
Télécharger le fichier
DC04_02.jpg (4.97 Ko)
Télécharger le fichier
 DC04_03.jpg (5.13 Ko)
Télécharger le fichier
DC04_03.jpg (5.13 Ko)
Télécharger le fichier
 DC04_04.jpg (4.65 Ko)
Télécharger le fichier
DC04_04.jpg (4.65 Ko)
Télécharger le fichier
 DC04_05.jpg (4.72 Ko)
Télécharger le fichier
DC04_05.jpg (4.72 Ko)
Télécharger le fichier
 DC04_06.jpg (6.36 Ko)
Télécharger le fichier
DC04_06.jpg (6.36 Ko)
Télécharger le fichier
 DC04_07.jpg (7.42 Ko)
Télécharger le fichier
DC04_07.jpg (7.42 Ko)
Télécharger le fichier
 DC04_08.jpg (6.54 Ko)
Télécharger le fichier
DC04_08.jpg (6.54 Ko)
Télécharger le fichier
 DC04_09.jpg (6.25 Ko)
Télécharger le fichier
DC04_09.jpg (6.25 Ko)
Télécharger le fichier
 DC04_10.jpg (5.27 Ko)
Télécharger le fichier
DC04_10.jpg (5.27 Ko)
Télécharger le fichier
 DC04_11.jpg (5.46 Ko)
Télécharger le fichier
DC04_11.jpg (5.46 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Loading...