Object Pose: The Link between Weak Perspective, Paraperspective and Full Perspective
Résumé
Recently, DeMenthon and Davis (1992, 1995) proposed a method for determining the pose of a 3-D object with respect to a camera from 3-D to 2-D point correspondences. The method consists of iteratively improving the pose computed with a weak perspective camera model to converge, at the limit, to a pose estimation computed with a perspective camera model. In this paper we give an algebraic derivation of DeMenthon and Davis' method and we show that it belongs to a larger class of methods where the perspective camera model is approximated either at zero order (weak perspective) or first order (paraperspective). We describe in detail an iterative paraperspective pose computation method for both non coplanar and coplanar object points. We analyse the convergence of these methods and we conclude that the iterative paraperspective method (proposed in this paper) has better convergence properties than the iterative weak perspective method. We introduce a simple way of taking into account the orthogonality constraint associated with the rotation matrix. We analyse the sensitivity to camera calibration errors and we define the optimal experimental setup with respect to imprecise camera calibration. We compare the results obtained with this method and with a non-linear optimization method.
Fichier principal
 pose-affiter-ijcv.pdf (480.82 Ko)
Télécharger le fichier
pose-affiter-ijcv.pdf (480.82 Ko)
Télécharger le fichier
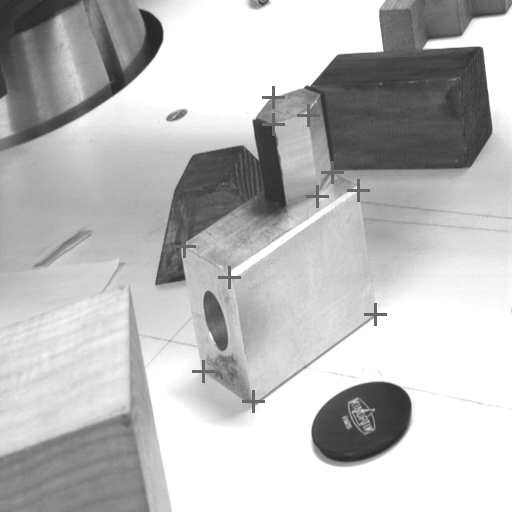
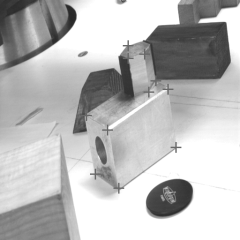 pose-image.jpg (102.48 Ko)
Télécharger le fichier
pose-image.jpg (102.48 Ko)
Télécharger le fichier
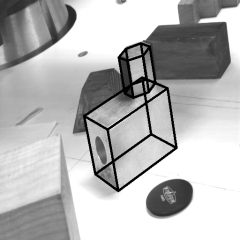 pose-model.jpg (114.26 Ko)
Télécharger le fichier
pose-model.jpg (114.26 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Loading...