Scene Flow from Depth and Color Images
Résumé
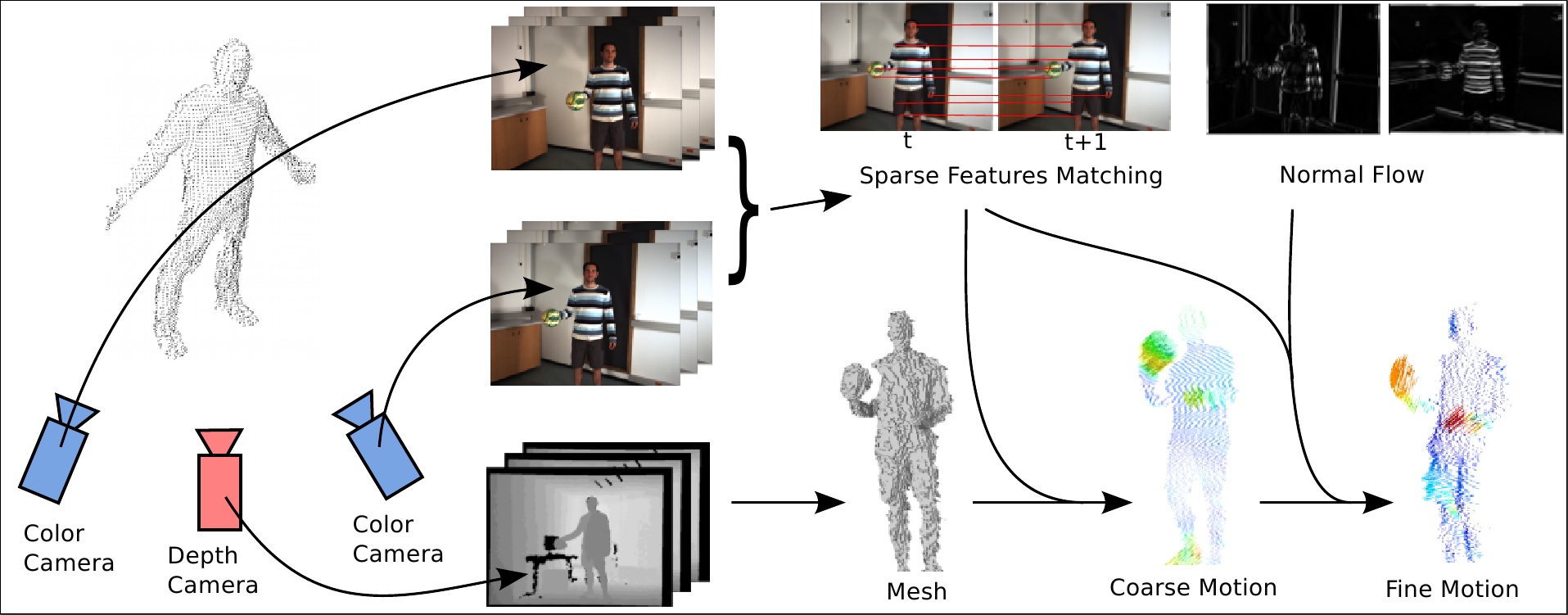
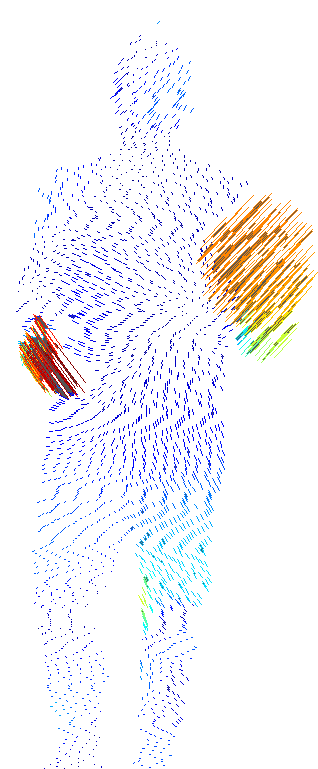
In this paper we consider the problem of estimating a 3D motion field using multiple cameras. In particular, we focus on the situation where a depth camera and one or more color cameras are available, a common situation with recent composite sensors such as the Kinect. In this case, geometric information from depth maps can be combined with intensity variations in color images in order to estimate smooth and dense 3D motion fields. We propose a unified framework for this purpose, that can handle both arbitrary large motions and sub-pixel displacements. The estimation is cast as a linear optimization problem that can be solved very efficiently. The novelty with respect to existing scene flow approaches is that it takes advantage of the geometric information provided by the depth camera to define a surface domain over which photometric constraints can be consistently integrated in 3D. Experiments on real and synthetic data provide both qualitative and quantitative results that demonstrate the interest of the approach.
Fichier principal
 main.pdf (680.57 Ko)
Télécharger le fichier
main.pdf (680.57 Ko)
Télécharger le fichier
 overview.jpg (264.17 Ko)
Télécharger le fichier
bmvc11_poster.pdf (3.35 Mo)
Télécharger le fichier
extended_abstract.pdf (2.79 Mo)
Télécharger le fichier
overview.jpg (264.17 Ko)
Télécharger le fichier
bmvc11_poster.pdf (3.35 Mo)
Télécharger le fichier
extended_abstract.pdf (2.79 Mo)
Télécharger le fichier
 res_0.png (29.2 Ko)
Télécharger le fichier
res_0.png (29.2 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Autre
Format : Autre
Format : Figure, Image
Loading...