Eulerian Contact for Versatile Collision Processing
Résumé
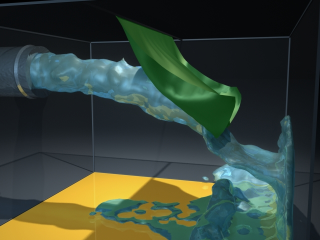
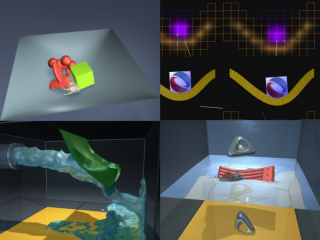
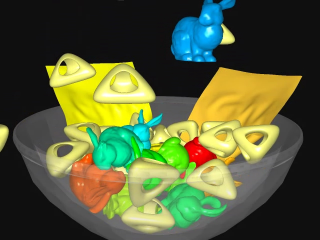
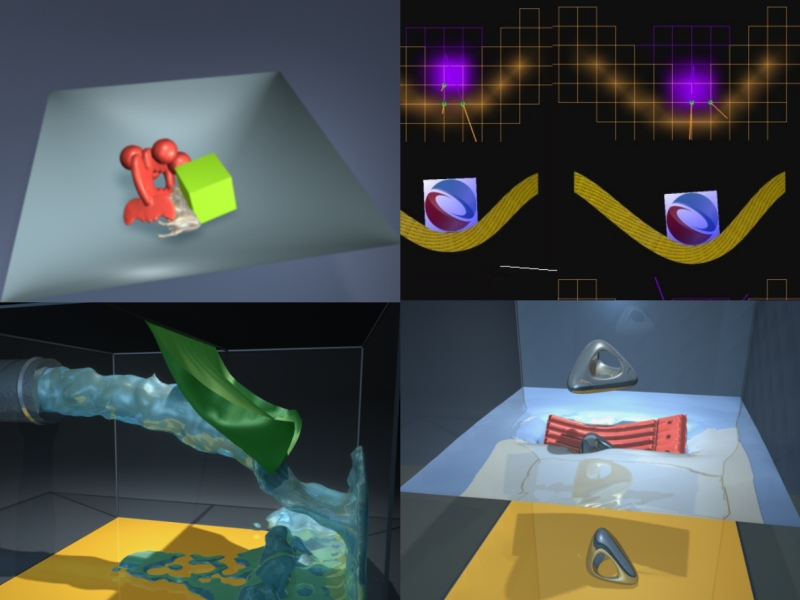
We propose a new approach for collision modeling in physically based animation. Contrary to most current approaches, our method can be used with all physical models rather than any specific class. At each time step, the geometry of the bodies is mapped to a sparse regular Eulerian grid. Each grid point carries a mass, a velocity and a spatial density. This grid acts as a common mechanical layer where detection, modeling and reaction to collision take place, without any assumption about the internal dynamics of the bodies in contact. Mappings are then used to propagate penalty- and constraint-based reactions back to the bodies. We show that mappings can be easily set up for the most commonly used physical models. Our approach greatly simplifies the implementation of collision modeling since we only have to consider each body's individual mapping to the Eulerian grid, rather than numerous model pair-specific methods. Moreover, it allows us to design and reuse efficient collision response strategies independently of the physical models. We demonstrate our method with a variety of models including rigid bodies, deformable solids and fluids.
Fichier principal
 EulerianContact.pdf (7.07 Mo)
Télécharger le fichier
EulerianContact.pdf (7.07 Mo)
Télécharger le fichier
 0sphfluid.jpg (140.39 Ko)
Télécharger le fichier
2d.avi (4.88 Mo)
Télécharger le fichier
eulerian.avi (1.11 Mo)
Télécharger le fichier
0sphfluid.jpg (140.39 Ko)
Télécharger le fichier
2d.avi (4.88 Mo)
Télécharger le fichier
eulerian.avi (1.11 Mo)
Télécharger le fichier
 euleriancontact.jpg (198.72 Ko)
Télécharger le fichier
scability.avi (7.79 Mo)
Télécharger le fichier
euleriancontact.jpg (198.72 Ko)
Télécharger le fichier
scability.avi (7.79 Mo)
Télécharger le fichier
 soupe.jpg (127.73 Ko)
Télécharger le fichier
sph.avi (1.66 Mo)
Télécharger le fichier
soupe.jpg (127.73 Ko)
Télécharger le fichier
sph.avi (1.66 Mo)
Télécharger le fichier
{kind=link}
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Autre
Format : Autre
Format : Figure, Image
Format : Autre
Format : Figure, Image
Format : Autre
Loading...